


















81
ARM ROBOT
MANUAL
CONSTRUIRE ET PROGRAMMER L’ARM ROBOT
Pour assembler l’Arm Robot vous aurez besoin de construire sa structure, sa pince et la manette
de contrôle avec les pièces incluses ; ensuite vous devrez effectuer les connexions avec câbles
entre les servomoteurs et la carte Build & Code UNO. Enfin, Vous devrez programmer ses
fonctions et copier le programme dans la carte Build & Code UNO pour pouvoir utiliser l’Arm
Robot. L’Arm Robot fonctionne lorsqu’il est connecté à un ordinateur ou lorsqu’il est connecté
à une batterie 9V en utilisant le support de batterie inclus.
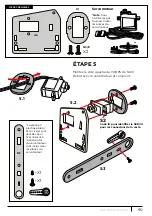
Monter l’Arm Robot
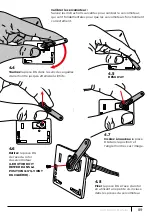
Veuillez suivre attentivement les instructions de montage. Il est nécessaire que vous lisiez
toutes les notes qui complètent les images afin d’assembler correctement l’Arm Robot. Il est
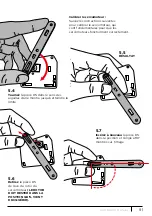
très important que vous fixiez les pièces dans la bonne position, comme montré sur les images,
et que vous calibriez correctement les servomoteurs comme il est indiqué. Fixer une pièce dans
une mauvaise position laisse supposer que dans les prochaines étapes vous ne pourrez plus
continuer à monter l’Arm Robot ou alors qu’il ne bougera pas correctement une fois monté
avec un risque de le casser.
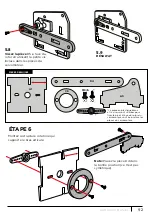
Les étapes principales de l’assemblage de l’Arm Robot sont :
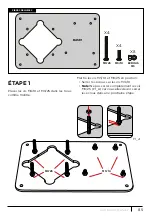
• Construire la pièce principale #1 BASE du Arm Robot (p. 10 - 12)
• Construire la pièce principale #2 CORPS (p. 13 – 20)
• Construire la pièce principale #3 AVANT-BRAS et PINCE (p. 21 – 27)
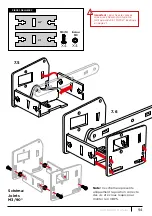
• Assemblez les 3 pièces principales entre elles (p. 28 – 32)
• Construisez la manette avec double joystick (p. 33)
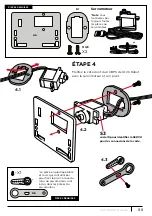
Connexions
L’Arm Robot utilise la carte Build & Code UNO, vous devez placer dessus le capteur Shield
Build & Code qui facilitera la connexion des 4 servomoteurs et des câbles des 2 joysticks. Les 4
servomoteurs se connectent aux broches numériques PWM, et les 2 joysticks se connectent aux
4 entrées analogiques (un pour l’axe X et l’autre pour l’axe Y). Vous devez vérifier que chaque
connexion soit correctement réalisée sinon les mouvements de l’Arm Robot ne ressembleront
pas à ceux indiqués.
Programmation
Vous pouvez écrire le programme grâce aux plateformes Arduino IDE ou le logiciel de
programmation par blocs. Téléchargez le logiciel Arduino IDE ou le logiciel de programmation
par blocs et installez-le sur votre ordinateur. Les deux sont compatibles avec Windows, Mac
et Linux. Configurez le logiciel Arduino IDE ou le logiciel de programmation par blocs comme
si vous utilisiez une carte Arduino UNO, puisque la carte Build & Code UNO possède le même
microcontrôleur.
Instructions de configuration de Arduino IDE et le logiciel de programmation
par blocs.
Il y a deux façons de configurer le Arm Robot :
1. Téléchargez le code à partir de notre site internet et installez-le. Le code a des commentaires
pour que vous puissiez comprendre comment il marche.
Ressources pour le Arm Robot : exercices et codes
Summary of Contents for Arm Robot
Page 2: ...LANGUAGE INDEX Choose the language SPANISH FRENCH ITALIAN ENGLISH DEUTSCHLAND...
Page 3: ...ndice Interactivo 3 ARM ROBOT MANUAL...
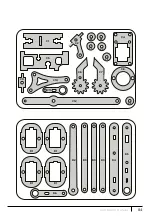
Page 5: ...5 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 TUERCA M3 X4 X18 X18 X7 X5 X26...
Page 38: ...38 ARM ROBOT MANUAL...
Page 39: ...39 ARM ROBOT MANUAL...
Page 40: ...Interactive index 40 ARM ROBOT MANUAL ENG...
Page 42: ...42 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 Nuts M3 X4 X18 X18 X7 X5 X26...
Page 75: ...75 ARM ROBOT MANUAL...
Page 76: ...76 ARM ROBOT MANUAL...
Page 77: ...Interactif sommaire 77 ARM ROBOT MANUAL FR...
Page 79: ...79 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 crous M3 X4 X18 X18 X7 X5 X26...
Page 112: ...112 ARM ROBOT MANUAL...
Page 113: ...113 ARM ROBOT MANUAL...
Page 114: ...Indice Interattivo 114 ARM ROBOT MANUAL IT...
Page 116: ...116 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 DADO M3 X4 X18 X18 X7 X5 X26...
Page 149: ...149 ARM ROBOT MANUAL...
Page 150: ...150 ARM ROBOT MANUAL...
Page 151: ...Interaktive Index 151 ARM ROBOT MANUAL DE...
Page 188: ...Arm Robot Electronic and programming kit Arm Robot and double joystick gamepad ebotics com...

































































