



























Summary of Contents for Arm Robot
Page 2: ...LANGUAGE INDEX Choose the language SPANISH FRENCH ITALIAN ENGLISH DEUTSCHLAND...
Page 3: ...ndice Interactivo 3 ARM ROBOT MANUAL...
Page 5: ...5 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 TUERCA M3 X4 X18 X18 X7 X5 X26...
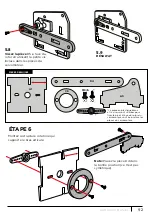
Page 38: ...38 ARM ROBOT MANUAL...
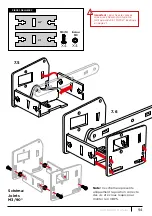
Page 39: ...39 ARM ROBOT MANUAL...
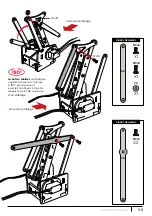
Page 40: ...Interactive index 40 ARM ROBOT MANUAL ENG...
Page 42: ...42 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 Nuts M3 X4 X18 X18 X7 X5 X26...
Page 75: ...75 ARM ROBOT MANUAL...
Page 76: ...76 ARM ROBOT MANUAL...
Page 77: ...Interactif sommaire 77 ARM ROBOT MANUAL FR...
Page 79: ...79 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 crous M3 X4 X18 X18 X7 X5 X26...
Page 112: ...112 ARM ROBOT MANUAL...
Page 113: ...113 ARM ROBOT MANUAL...
Page 114: ...Indice Interattivo 114 ARM ROBOT MANUAL IT...
Page 116: ...116 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 DADO M3 X4 X18 X18 X7 X5 X26...
Page 149: ...149 ARM ROBOT MANUAL...
Page 150: ...150 ARM ROBOT MANUAL...
Page 151: ...Interaktive Index 151 ARM ROBOT MANUAL DE...
Page 188: ...Arm Robot Electronic and programming kit Arm Robot and double joystick gamepad ebotics com...


































































