
























P3
-
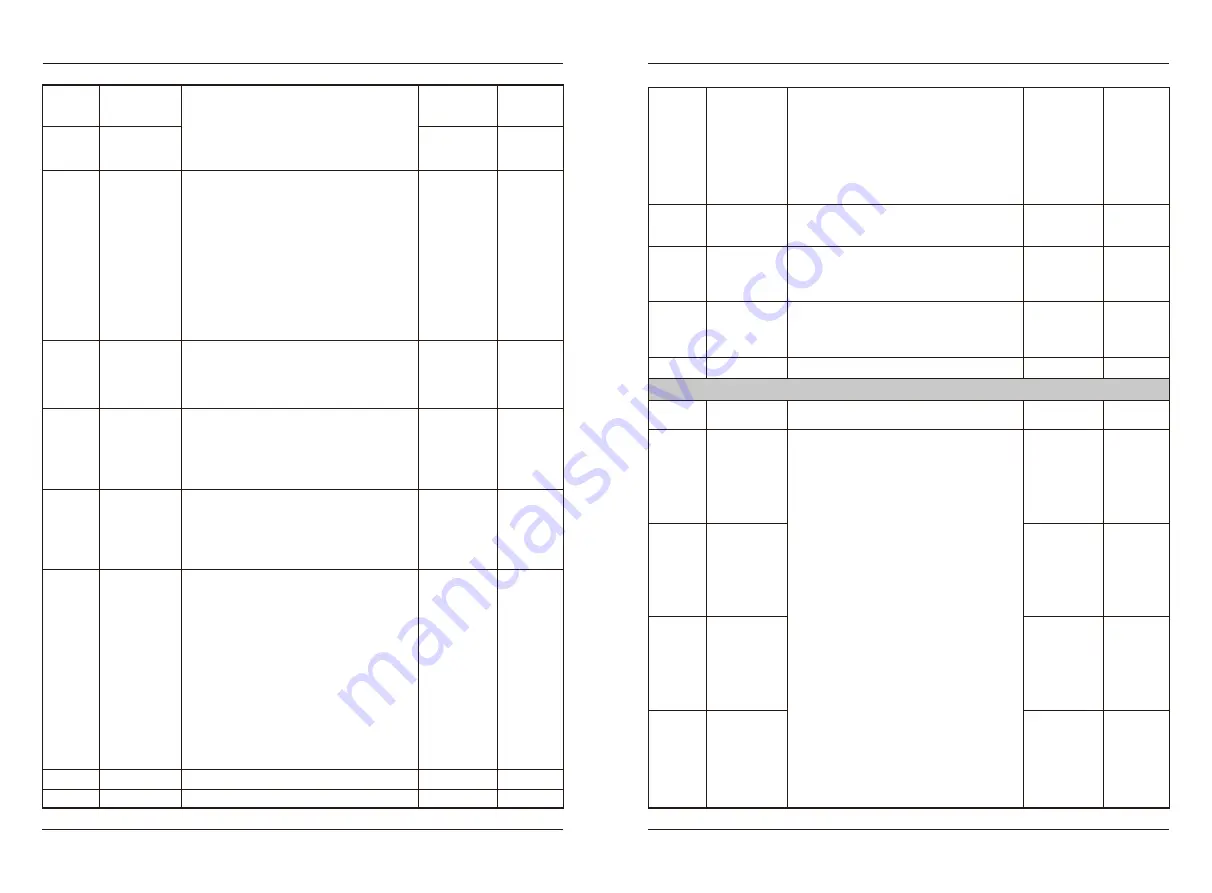
05
P3
-
06
P3
-
07
P3
-
08
P3
-
09
Multi-point
V/F frequency3
(F3)
Multi-point
V/F voltage3
(V3)
V/F Torque
boost
Cut-off
frequency of
torque boost
V/F slip
compensation
0305H
0306H
0307H
0308H
0309H
11: In VF semi separation mode, V and F are
proportional, but the proportional relation-
ship can be set through voltage source P3-15,
and the relationship between V and F is also
related to the rated voltage and rated
frequency of P1 group motor.
0.1
~
30.0%
In order to compensate the low-frequency
torque characteristics of V / F control,
the output voltage of the AC drive at low-
frequency is increased and compensated. But
the torque lifting setting is too large,
the motor is easy to overheat, and the AC
drive is easy to overcurrent. When the
torque rise is set to 0.0, the AC drive is
the automatic torque rise. At this time,
the AC drive automatically calculates the
required torque rise value according to the
motor stator resistance and other parameters.
0.00
~
maximum frequency
Torque lifting torque cut-off frequency:
under this frequency, the torque lifting
torque is effective. If the set frequency
is exceeded, the torque lifting fails.
0
~
200.0%
This parameter is only valid for asynch-
ronous motor. It can compensate the motor
speed deviation when the load increases,
and keep the motor speed stable when the
load changes.
50.00Hz
100%
6.0%
50.00Hz
0.0%
P3
-
10
Over-excitation
gain
030AH
0
~
2.00
During the deceleration process of AC drive,
the overexcitation control can restrain the
rise of bus voltage and avoid over-voltage
fault. The larger the overexcitation gain,
the stronger the suppression effect.
0.64
P3
-
11
P3
-
12
0
~
100
The selection method of the gain is to
minimize the vibration under the premise
of effective suppression, so as to avoid
adverse impact on VF operation. When the
motor has no oscillation, please select the
gain as 0.
Only when the motor oscillates obviously, it
is necessary to increase the gain properly.
The larger the gain is, the more obvious the
suppression of the oscillation is. When using
the vibration suppression function, the motor
rated current and no-load current parameters
shall be accurate, otherwise the VF vibration
suppression effect is not good.
-
Model
dependent
-
030BH
030CH
V/F oscillation
suppression gain
Reserved
P3
-
13
-
-
030DH
Reserved
P3
-
14
0V
~
Rated motor voltage
0: Digital setting (P3-15)
1: AI1 2: AI2 3: AI3
4: Pulse setting (DI5)
5: Multi-reference
6: Simple PLC
7: PID
8: Communication setting
Note: 100.0% corresponds to the rated
voltage of the motor.
0V
0
P3
-
15
030EH
030FH
Voltage source
for V/F
separation
selection
Voltage digital
setting for
V/F separation
P3
-
16
0.0
~
1000.0s
It refers to the time required for the
output voltage to accelerate from 0 to the
rated voltage of the motor.
10.0s
0310H
Voltage
acceleration
time of V/F
separation
0V
~
Rated motor voltage
It refers to the time required for the
output voltage to decelerate from the
rated voltage of the motor to 0.
10.0s
P3
-
17
0311H
Voltage
deceleration
time of V/F
separation
P3
-
18
-
0312H
Reserved
P4
I np ut T er mi n a ls fu n cti o n
P4
-
00
Function
Code
S1 terminal
function
Parameter Name
Setting Range
1
Default
0400H
Address
P4
-
01
S2 terminal
function
2
0401H
P4
-
02
S3 terminal
function
8
0402H
0
:
No function 1
:
Forward RUN (FWD)
2
:
Reverse RUN (REV) 3
:
Three-Wire control
4
:
Forward JOG (FJOG) 5
:
Reverse JOG (RJOG)
6
:
Coast to stop 7
:
Emergency stop
8
:
Fault reset (RESET)
9
:
External fault input
10
:
Terminal UP 11
:
Terminal DOWN
12
:
UP and DOWN setting clear
13
:
Speed control/Torque control switchover
14
:
Speed search start enable
15
:
Reserved
16
:
Multi-reference terminal 1
17
:
Multi-reference terminal 2
18
:
Multi-reference terminal 3
19
:
Multi-reference terminal 4
20
:
Terminal 1 for acceleration/deceleration
time selection
21
:
Terminal 2 for acceleration/deceleration
time selection
22
:
Acceleration/Deceleration prohibited
23
:
PID control cancel 24
:
PID control pause
25
:
PID integral pause
26
:
PID characteristic switching
27
:
PID parameter switchover
28
:
PID target value switchover terminal1
P4
-
03
S4 terminal
function
53
0403H
-
-
1 5
-
-
16
-
F u n c t i o n C o d e T a b l e
EC620
EC620
F u n c t i o n C o d e T a b l e







































































