

















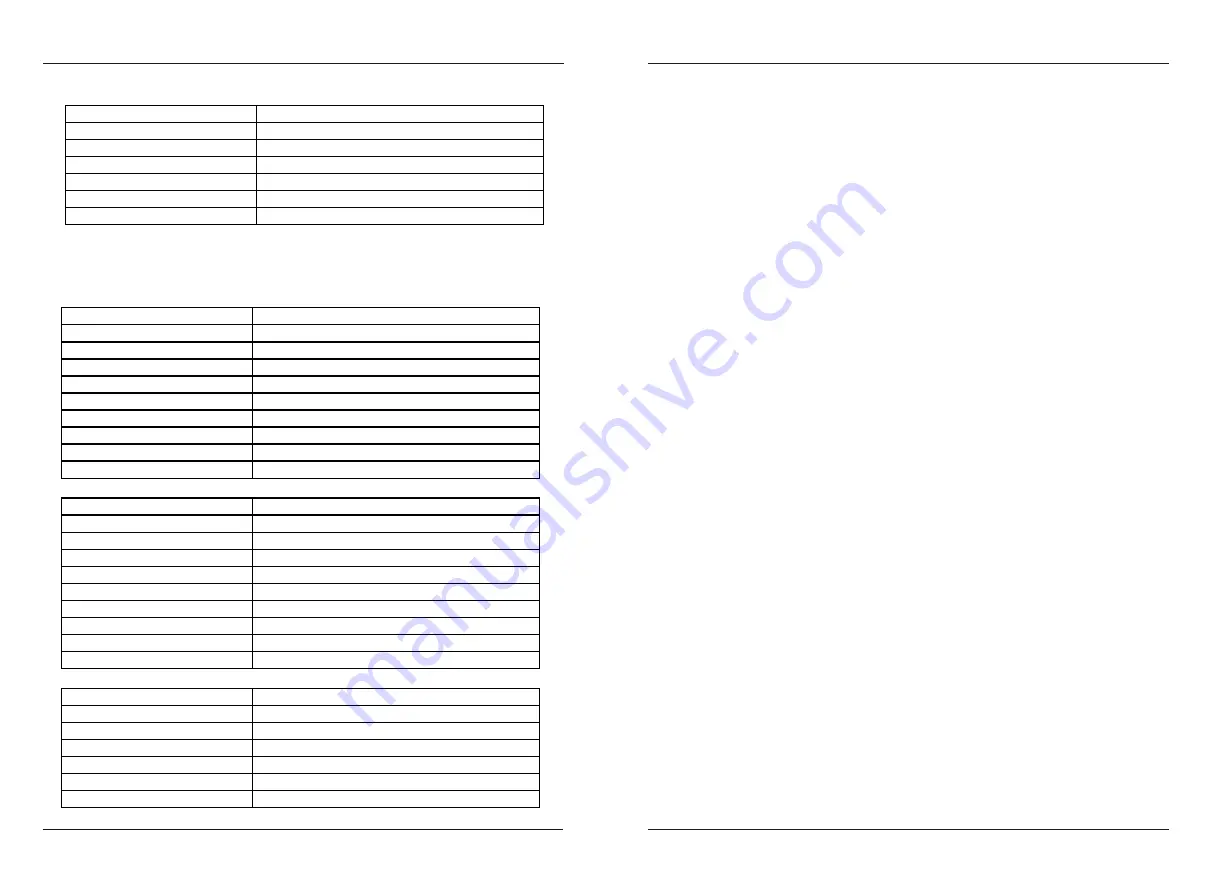
RTU sub machine responding information(when abnormal)
START
Sub machine address
Order code
CRC CHK low position
CRC CHK high position
END
3.5 pieces bytes transmit time
01H
86H
01H
83H
A0H
3.5 pieces bytes transmit time
Error code
END
Order code: 08H, return circuit self check
Function: send back the sub machine responding information which same to
the main machine order information, used to check whether the signal transmit
between main machine and sub machine are normal.
3.5 pieces bytes transmit time
01H
08H
00H
00H
13H
88H
EDH
5DH
3.5 pieces bytes transmit time
3.5 pieces bytes transmit time
01H
88H
03H
06H
01H
3.5 pieces bytes transmit time
RTU sub machine responding information (when normal)
RTU sub machine responding information (when abnormal)
3.5 pieces bytes transmit time
01H
08H
00H
00H
13H
88H
EDH
5DH
3.5 pieces bytes transmit time
RTU main machine order information
START
Sub machine address
Order code
Check the code high position
Check the code low position
Data high position
Data low position
CRC CHK low position
CRC CHK high position
END
START
Sub machine address
Order code
Check the code high position
Check the code low position
Data high position
Data low position
CRC CHK low position
CRC CHK high position
END
START
Sub machine address
Order code
CRC CHK low position
CRC CHK high position
END
Error code
END
●
Communication frame error verify method
The standard Modbus series internet adopt two type error test method.
Odd-even verification used to verify each character, CRC test used to verify
one frame data.
1: Odd-even verification
The user can configure the controller at odd or even verification, or no
verification. This will decide the odd-even verification position of each
character how to set.
If appointed odd or even verification, the digit bit of “1” will count
the digit bit of each character(ASCII mode 7 data capacity, 8 data bit in
RTU). Example, RTU character frame include the below 8 pieces data bit: the
number of whole “1” in 1 1 0 0 0 1 0 1 is 4 pieces, if use even verifica-
tion, the odd-even verification bit of frame will be 0, then obtain the quan-
tity of whole “1” still be 4, also not process verification test. Replace
one attached stop bit fill to the need transmit character frame.
2: CRC-16(circulating redundancy verification)
Use RTU frame format, the frame include the counting frame error test
area which based on CRC method. CRC region test the content of the whole
frame. CRC region is two bits, include the 16 bits binary system value.
This calculating method of CRC adopt international standard CRC verification
rules, the user can reference the relate standard CRC algorithm when edit the
CRC algorithm, write out the CRC calculating procedure which really in accor-
dance with requirements.
●
The definition of communication data address
This part is the address definition of communication data, used to control
the running of AC drive, obtain the status information of AC drive and the
relate function parameter setting of AC drive, etc.
(1) EC6000 series function parameter address description rules
Use the function parameter serial number of AC drive as the register add-
ress, divided into two parts at high bits and low bits. High bits represent
the function parameter located group serial number, low bits represent the
serial number in group of function parameter, need translate into hexadecimal.
The address of detail parameter please check the communication address column
in the parameter overview table in chapter
?
Note: because the communication exist the possibility that frequently rewrite parameter
value, if EEPROM frequently been storage then will reduce the working life. For the
users, some function code parameter needn’t storage under the communication mode,
only need to change the value of RAM in the sheet then can meet use requirements.
AC80B communication agreement stipulated that when use the write order, only write in
AC drive RAM, not storage when power off, if use write order (41H), write in EEPROM,
means storage when power off.
R S 4 8 5 c o m m u n i c a t i o n p r o t o c o l
EC6000
R S 4 8 5 c o m m u n i c a t i o n p r o t o c o l
EC6000
-
5 4
-
-
55
-







































































