




















18
JP
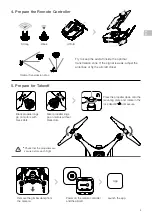
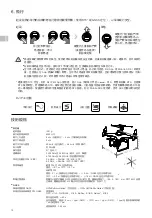
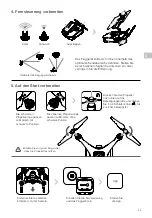
6.
飛行
安全に離陸するために、機体ステータスインジケーターがゆっくり緑色に点滅することを確認して
ください(測位に
RTK*
または
GNSS
を使用)。
•
回転しているプロペラは危険です。回転しているプロペラやモーターから離れてください。近くに人がいる
場合や狭い場所では、モーターを始動させないでください。
•
モーターの回転中は送信機から手を離さないでください。
•
飛行中のモーター停止:
CSC
を実行すると、モーターが停止します。
DJI
アプリまたは
DJI Mobile SDK
を介
して有効にすることができます(まもなく対応が開始されます。サードパーティ製のアプリでの選択が必要
です)。飛行中のモーター停止は、人体・物体への損傷・負傷のリスクを低減させる目的で緊急時のみ行っ
てください。
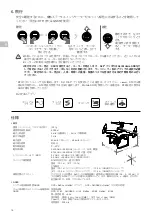
離陸
着陸
または
コンビネーションスティックコ
マンドでモーターを始動/
停止させる
左スティック(モード
2
)
をゆっくりと押し上げて
離陸する
着地するまで、左ステ
ィックをゆっくりと下
げる
3
秒間そのまま保持す
ると、モーターが停止
する
* RTK
のポジショニングをお勧めします。
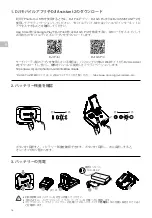
DJI Pilot
アプリを使用している場合は、カメラビュー
> > RTK
から機
体
RTK
を有効にし、
RTK
信号を受信する方法を選択します。
Mobile SDK
を使用している場合は、
RTK
設定に関する
SDK
文書を参照してください。
DJI Pilot
アプリ
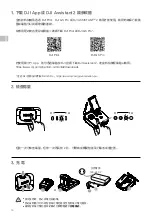
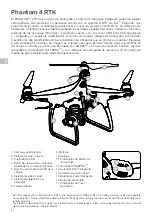
仕様
Y
289.5
mm
289.5
mm
213 mm
X
Z
18
2 m
m
172 m
m
136 mm
71 mm
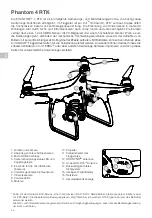
マニュアル
フライト
ウェイポ
イント
オブリーク
(斜め撮影)
マッピング
•
機体
重量(バッテリーとプロペラを含む)
1391 g
運用限界高度
(
海抜)
6,000 m
最大上昇速度
6 m/s
(自動飛行)、
5 m/s
(手動制御)
最大下降速度
3 m/s
最大速度
50 km/h
(
P
モード)、
58 km/h
(
A
モード)
最大飛行時間
約
30
分
動作環境温度
0
~
40
℉
C
動作周波数
2.400 GHz
~
2.483 GHz
(ヨーロッパ、日本、韓国)
5.725 GHz
~
5.850 GHz
(その他の国・地域)
トランスミッター出力(
EIRP
)
2.4 GHz
:
< 20 dBm
(
CE / MIC / KCC
)
5.8 GHz
:
< 26 dBm
(
FCC / SRRC / NCC
)
ホバリング精度範囲
RTK
が有効化され、適切に動作:
垂直:±
0.1 m
、水平:±
0.1 m
RTK
無効:
垂直:±
0.1 m
(ビジョンポジショニング)、±
0.5 m
(
GNSS
ポジショニング)
水平:±
0.3 m
(ビジョンポジショニング)、±
1.5 m
(
GNSS
ポジショニング)
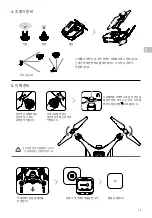
画像位置のオフセット
カメラの中心の位置は、
Exif
データの映像座標に適用済みの機体本体の軸(
36
、
0
、
192 mm
)の
下の内蔵型
D-RTK
アンテナの位相中心を基準にしています。機体の正の
x
、
y
、
z
軸は、それぞれ
航空機の前方、右側、下方に向いています。
•
GNSS
シングル周波数高感度
GNSS
GPS + Galileo*
(アジア)、
GPS + G Galileo*
(その他の地域)
マルチ周波数マルチシステム高精度
RTK
GNSS
使用周波数
GPS
:
L1/L2
、
GLONASS
:
L1/L2
、
BeiDou
:
B1/B2
、
Galileo*
:
E1/E5
第一固定時間:
< 50 s
測位精度:垂直
1.5 cm + 1 ppm
(
RMS
)、水平
1 cm + 1 ppm
(
RMS
)。
1 ppm
は、
1 km
の移動で
1 mm
の増加を伴うエラーを示します。
速度精度:
0.03 m/s
Summary of Contents for Phantom 4 RTK
Page 75: ...RTK SDK www dji com ...