





















12
CHT
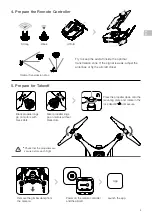
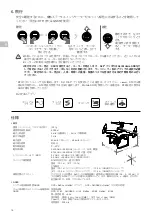
6. 飛行
起飛前務必等待航拍機狀態指示燈綠燈緩慢閃爍(使用
RTK*
或
GNSS
定位),以保障飛行安全。
起飛
降落
●
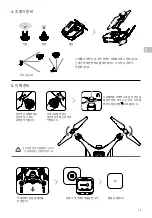
高速旋轉的螺旋槳具有危險性,使用時應與航拍機保持安全距離,並讓航拍機遠離人群、建築物、樹木或其他
遮擋物。
●
在航拍機馬達完全停止前,請勿放下手中的遙控器,並請確保航拍機完全在掌控之中。
●
空中停止馬達方式:透過執行綜合控制桿指令可以停止馬達,此功能可透過
DJI App
或
Mobile SDK
(即將支
援,且需第三方
App
具備此開關)開啓。空中停止馬達會導致航拍機墜毀,因此僅限用於發生特殊情況(例如
航拍機可能衝向人群)
時需要緊急停止馬達以將傷害降至最低。
或
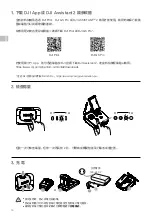
綜合控制桿指令:
馬達啟動/停止
啟動馬達
緩慢向上推動油門桿
(美國手為左搖桿)
航拍機起飛
緩慢向下拉動油門桿,
直到航拍機降落為止。
使油門桿保持在最低位
置
3
秒,馬達即停止。
*
建議使用
RTK
定位。對於
DJI Pilot App
使用者,進入
App
手動飛行界面
> > RTK
,開啓航拍機
RTK
,並選擇
RTK
服務類型。若選擇網路
RTK
,確保遙控器已連接航拍機,行動裝置可連線網際網路,然後點擊購買網路
RTK
套
組
>
購買套組,根據提示操作即可獲取贈送的網路
RTK
套組。對於
Mobile SDK
使用者,參考
SDK
相關說明設定此
功能。
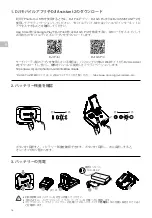
DJI Pilot
功能
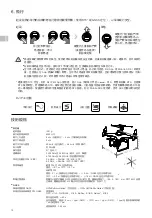
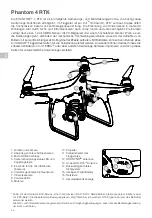
技術規格
●
航拍機
起飛重量
1391 g
最大起飛海拔高度
6000
公尺
最大上升速度
6 m/s
(自動飛行);
5 m/s
(手動操控航拍機)
最大下降速度
3 m/s
最大水平飛行速度
50 km/h
(定位模式);
58 km/h
(姿態模式)
飛行時間
約
30
分鐘
操作溫度
0
℃
至
40
℃
運轉頻率
2.400 GHz
至
2.483 GHz
(歐洲、日本、韓國)
5.725 GHz
至
5.850 GHz
(其他國家和地區)
等效全向輻射功率(
EIRP
)
2.4 GHz
:
< 20 dBm
(
CE / MIC / KCC
)
5.8 GHz
:
< 26 dBm
(
FCC / SRRC / NCC
)
懸停準確度
啟用
RTK
且
RTK
正常運作時:
垂直:±
0.1 m
;水平:±
0.1 m
未啟用
RTK
:
垂直:
0.1 m
(視覺定位正常運作時);±
0.5 m
(
GNSS
定位正常運作時)
水平:±
0.3 m
(視覺定位正常運作時);±
1.5 m
(
GNSS
定位正常運作時)
影像位置補償
相機中心相對於機載
D-RTK
天線相位中心的位置,體軸座標系下:(
36
,
0
,
192
)
mm
,照片
EXIF
座標
已補償。體軸座標系的
XYZ
軸正向分別指向航拍機的前、右及下方
●
GNSS
單頻高靈敏度
GNSS
GPS+Galileo*
(亞洲地區);
GPS+Galileo*
(其他地區)
多頻多系統高精準度
RTK GNSS
使用頻率
GPS
:
L1/L2
;
GLONASS
:
L1/L2
;
BeiDou
:
B1/B2
;
Galileo*
:
E1/E5
首次定位時間:
< 50 s
定位精準度:垂直
1.5 cm + 1 ppm
(
RMS
);水平
1 cm + 1 ppm
(
RMS
)。
1 ppm
是指航拍機每移動
1 km
誤差增加
1 mm
速度精準度:
0.03 m/s
Y
289.5
mm
289.5
mm
213 mm
X
Z
18
2 m
m
172 m
m
136 mm
71 mm
手動飛行
航點飛行
正射出圖
傾斜攝影
Summary of Contents for Phantom 4 RTK
Page 75: ...RTK SDK www dji com ...







































































