





























8.12
Electronic Gearing, Master-slave operation
In the case of the “electronic gearing” functionality (see setup software and description of
GEARMODE parameter), the servo amplifier is controlled by a secondary feedback
device as a slave.
It is possible to set up master/slave systems, use an external encoder as a setpoint
encoder or connect the amplifier to a stepper motor control.
The amplifier is parameterized using the setup software (electronic gearing). The resolu-
tion (number of pulses per revolution) can be adjusted.
The following types of external encoder can be used:
secondary Feedback type
Connector
Wiring
diagram
GEARMODE
SinCos Encoder ENDAT
X1
ð
8
SinCos Encoder HIPERFACE
X1
ð
9
SinCos Encoder w/o data channel
X1
ð
6, 7
ROD* (AquadB) 5V
X5
ð
3
ROD (AquadB) 24V
X3
ð
2
SSI
X5
ð
5
Step/direction 5V
X5
ð
4
Step/direction 24V
X3
ð
1
* ROD is an abbreviation for incremental encoder
8.12.1
Connection to a SERVOSTAR master, 5 V signal level (X5)
You can link several SERVOSTAR amplifiers together in master-slave operation.
Master:
position autput to X5 (screen page "Encoder emulation")
Slave:
screen page "Electronic gearing" (GEARMODE)
Up to 16 slave amplifiers can be controlled by the master, via the encoder output. The
SubD connector X5 is used for this purpose.
Frequency limit: 1.5 MHz
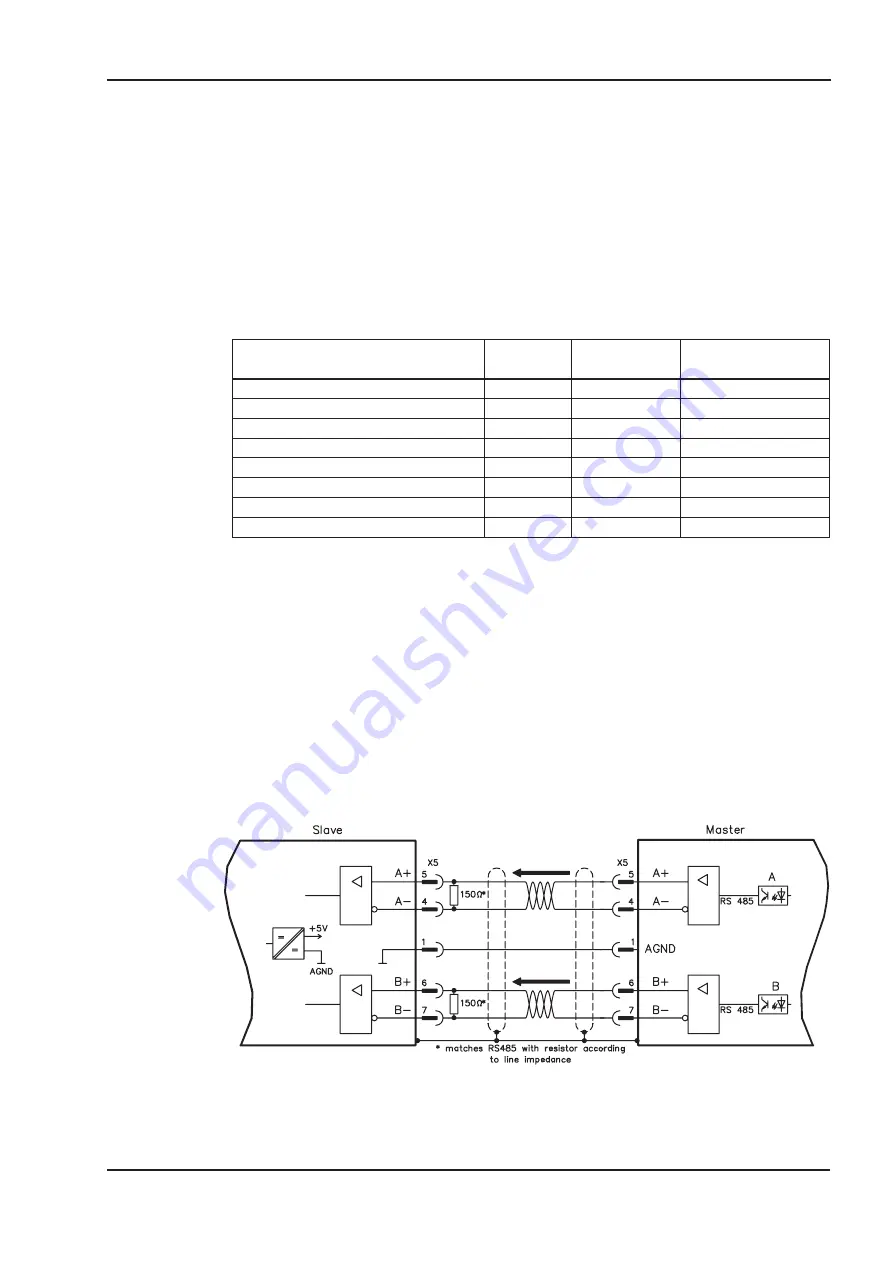
Example for Master-Slave operation with two SERVOSTAR amplifiers:
Slave
GEARMODE: 3
Master
ENCMODE:1
SERVOSTAR
®
300 Product Manual
67
Danaher Motion
10/2007
Electrical installation
SERVOSTAR 300
SERVOSTAR





















































