C
IrCuIT
f
unCTIons
www.DaikinApplied.com 65
IOM 1242-2 • PATHFINDER
®
MODEL AWV CHILLERS
Speed Command To Motors
All fan motors will be sent a speed command via modbus. The
speed command is in units of rpm with 800 rpm corresponding
to 100% and will vary based on the percent speed calculation.
Speed Command = Percent Speed Calculation x 8
Normally the same speed command is sent to all motors on a
circuit.
Staging
Calculated RPM is a value used in the fan staging logic.
When the circuit run flag is 0, the fan stage is always 0. Once
the fan stage is more than 0, it will not be allowed to drop back
to 0 until the circuit run flag is 0.
The maximum fan stage is equal to the number of fans on the
circuit. When fan stage is 0, it will be set to the maximum fan
stage when the PI (porportional integral)loop reaches 100%.
This does not occur any time other than when the fan stage is
0.
Test Mode Control
When Control Mode is set to Test, the fan motors can be
manually controlled for test purposes.
The test settings allow selecting values from 0% to 100%.
When the test setting for a fan is set to 12.5% or higher, the
speed command corresponding to the test setting will be sent
and the run command will be sent to the fan.
Speed Command = Test setting x 8
When Control Mode is no longer set to Test, the following
actions should occur:
• all the test settings set back to 0%
• stop command sent to all motors
• speed command of 0 rpm sent to all motors
Evaporator EXV Control
This section outlines the positioning logic for the Evaporator
EXV, which is the EXV installed in the liquid line feeding the
evaporator.
• EXV will initially be positioned to control evaporator
pressure
• EXV will normally be positioned to control SSH (suction
superheat)
• SSH target will vary based on DSH (discharge superheat)
• In some conditions, EXV will be positioned to control
evaporator pressure to keep all parameters within
operating envelope
There are five EXV control states:
• Closed – EXV is closing or in the closed position
• Preopen – EXV is opening prior to compressor start
• Start Pressure Control – EXV is controlling to pressure
target after compressor start
• SSH Control – EXV is controlling suction superheat
• MOP Control – EXV is controlling to maximum operating
pressure for compressor
Closed State
If the unit is configured without liquid line solenoid valves, the
EXV position should be 0% any time the EXV is in a closed
state. The 0% position command also causes the evaporator
EXV module driver to reinitialize the valve to the zero position.
If the unit is configured with liquid line solenoid valves, the EXV
position should be 0% when the EXV initially enters the closed
state, while it is reinitializing to the zero position. After the
EXV position command has been 0% for one minute, the EXV
should be moved to 5% to prevent excessive pressure buildup
between the EXV and liquid line solenoid valve.
Preopen Operation
When the EXV state is Preopen, the EXV position command
will be 30%.
Pressure Control State
In Start Pressure Control, the EXV is positioned to control the
evaporator pressure to a target.
Pressure Target
The pressure target is calculated based on evaporator LWT,
then limits are applied to keep the target in an acceptable
range.
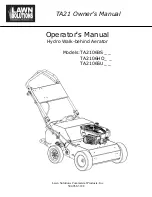
The base target value varies from 65 kPa to 420 kPa as LWT
varies from -5°C to 30°C.
Figure 66: Evaporator EXV Pressure Target
This base target is then limited to a range as defined by the
Minimum Limit and Maximum Limit shown below:
• Minimum Limit = Low Pressure Hold set point + 25 kPa
• Maximum Limit = Min {(Cond Pr + 101.325) / 1.7 –
101.325, Cond Pr – 180}
• If Maximum Limit < Minimum Limit, then Pressure Target
= Minimum Limit
30
-5
65
420
LWT (°C)
Base Target (kPa)
Summary of Contents for Pathfinder AWV Series
Page 4: ......