



























•
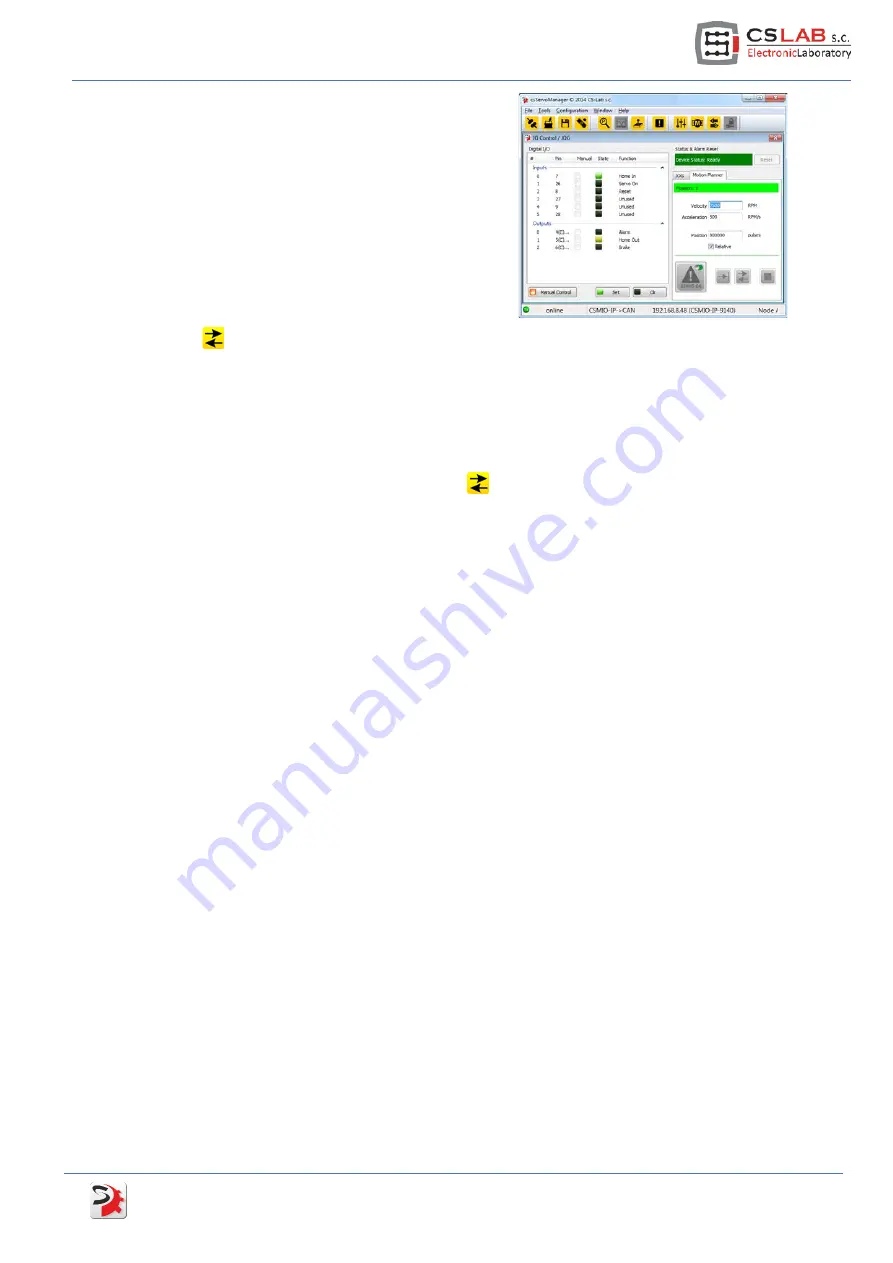
Leave the „JOG” tab and go to „Motion planner”
and 100 RPM velocity and about 1500 RPM/s
acceleration, position equal to encoder impulses
per rev number (1 motor revolution) set
“Relative”.
•
Make sure if the motion in 1 motor revolution
range won’t cause damage of a machine axis
mechanics and if any other person doesn’t work at
the axis as a motor will start to rotate in a
moment.
•
Click
button. The motor should start to rotate left and right in one motor revolution
range.
•
Current controller tuning:
o
Increase K
p
gain of current controller slowly until you get first symptoms of
overshoot - buzzing and squealing. Next decrease the K
p
slowly by 25%. If we get an
alarm state during the current controller tuning then you should decrease the gain
value by 25% and press „Reset” and again.
o
We tune the K
i
parameter of current controller the same way. Slowly increase the
gain and at first squealing or laud noises decrease the K
i
value by 25%.
•
Velocity controller tuning:
o
Increase K
p
gain of velocity controller slowly until you get first symptoms of
overshoot - buzzing and squealing. Next decrease the K
p
slowly by 25%.
o
We tune the K
i
parameter of velocity controller the same way. Slowly increase the
gain an at first vibrations decrease the K
i
value by 25%.
•
Position controller tuning:
o
Increase K
p
gain of position controller slowly until you get first symptoms of
overshoot - buzzing and vibrations. Next decrease the K
p
slowly by 20%.
simDrive™ AC Servo Drive -
U
SER
G
UIDE
37





















































