




























14
SM-Universal Encoder Plus User Guide
www.controltechniques.com
Issue Number: 6
3.4.5
Incremental plus comms (absolute encoders) SC.HiPEr, SC.EndAt and
SC.SSI
The SC.HiPEr and SC.EndAt encoders can be considered as a mixture of an
incremental encoder (analogue SinCos feedback signals) and an absolute encoder
(serial link used for absolute position). The only difference between the encoders being
the serial link protocol.
The RS 485 serial link allows the drive at power up to interrogate the SinCos encoder in
comms channel order to determine the initial absolute position of the encoder shaft.
When the interrogation is complete and the initial absolute position is known the position
is incremented from the absolute value using the analogue sine/cosine interface.
The comms channels can then be used for either error checking, Pr
x.17
or data
transfer, Pr
x.42
to Pr
x.43
. The incremental SinCos encoder can be used when
operating in either Closed Loop Vector or Closed Loop Servo modes.
The maximum speed in rpm which an encoder connected to the SM-Universal Encoder
Plus can reach can be calculated from:
Max rpm = (60 x Max input frequency) / Encoder LPR
e.g. For a 4096 line encoder the maximum rpm would be:
(60 x 600 x 10
3
) / 4096 = 8789rpm
NOTE
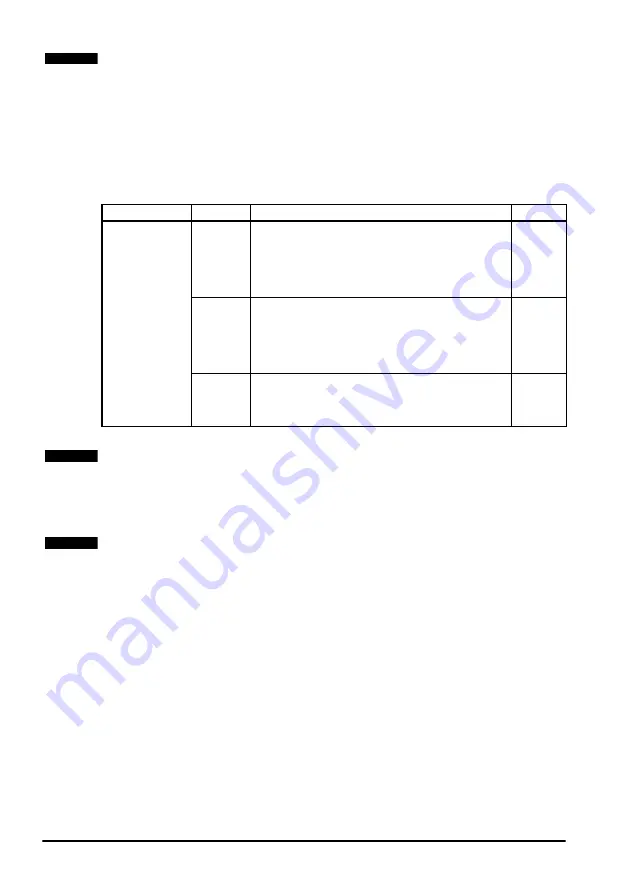
Type
Encoder
Description
Pr x.15
Incremental
plus
comms
(absolute
encoders)
SC.HiPEr
Absolute SinCos encoder using Stegmann RS485
comms protocol (HiperFace).
The option module checks the position from the sine
and cosine waveforms against the internal encoder
position using serial communications.
If an error occurs the drive trips.
7
SC.EndAt
Absolute SinCos encoder using EndAt comms
protocol
The option module checks the position from the sine
and cosine waveforms against the internal encoder
position using serial communications.
If an error occurs the drive trips.
9
SC.SSI
Absolute SinCos encoder using SSI comms protocol
The option module checks the position from the sine
and cosine waveforms against the internal encoder
position using serial communications.
11
It should be noted that the SC.HiPEr, SC.EndAt and SC.SSI encoders must be initialised
before their position data can be used. The encoder is automatically initialised at power-
up, after all trips are reset, or when the initialisation parameter (Pr
3.47
) is set to 1. If the
encoder is not initialised or the initialisation is invalid, the Solutions Module initiates a trip
7, and the drive will trip on SLX.Er.
NOTE
A flux alignment test is required during set up to determine the phase offset angle for
operation in servo mode.
NOTE