



























connected either to pin xxx at the ACU or to the ground at the encoder housing, never at both
ends. The power supply outputs are internally fused. Be aware not to cause a short circuit. If this
happens, the unit has to be opened and the fuse has to be replaced. Do not open the unit by
yourself, you will loose warranty in that case.
pin
signal
description
type
15
Clk+
SSI clock
OUT
16
Clk-
SSI clock
OUT
17
SHLD
Shield
21
Data+
SSI data
IN
22
Data-
SSI data
IN
23
SHLD
Shield
24
+24V
encoder power supply
25
0V
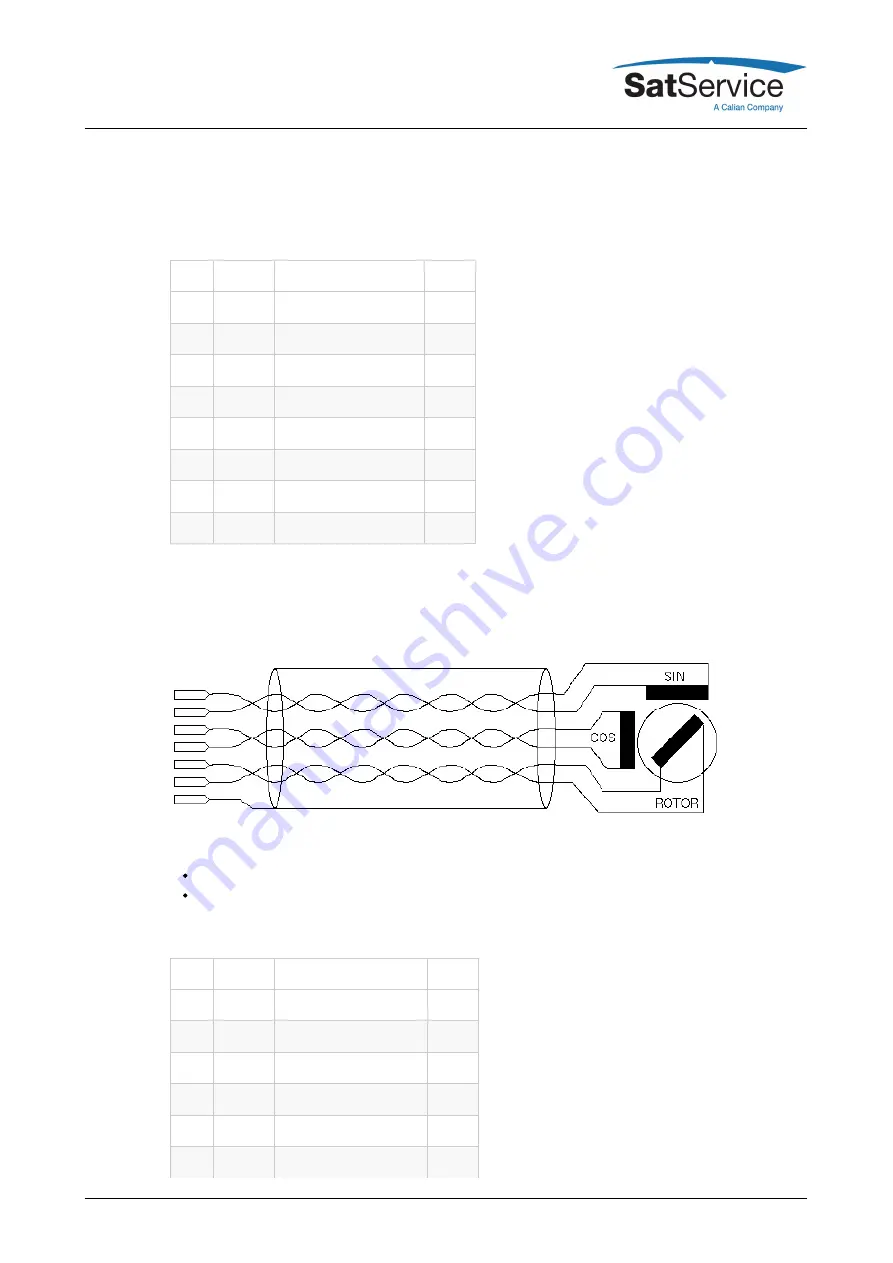
Resolver interface J7, J8
The ACU resolver interface is designed for resolvers with an impedance of 100 Ohms or more
and transfer factor 0.5. The interface applies 4Veff / 2000Hz to the resolver drive coil. It expects
2Veff at the sine / cosine inputs at the maximum positions.
When connecting a resolver to the ACU, please consider the following:
Use a shielded, twisted pair cable.
Connect the cable shield either to the case of the DSub9 connector or to the ground at the
resolver housing. Never connect the shield at both ends, this will introduce a ground loop
and cause a significant degradation of the resolver's accuracy.
pin
signal
description
type
1
SHLD
Shield
2
REF
drive signal to resolver
OUT
3
COS-
resolver COS
IN
4
SIN-
resolver SIN
IN
5
COS
resolver COS
IN
6
SHLD
Shield
(C) 2022, SatService GmbH
www.satnms.com
ACU2-19V2-UM-2209 Page 12/99





















































