





























Technical data • 8JSA3 - Technical data
36
8JSA user's manual V1.00
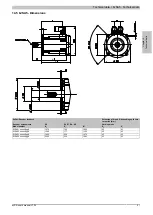
12.4 Maximum shaft load
Note the information in section
"Load capacity of the shaft end and bearing" on page 70
conditions".
0
5
10
15
20
25
150
200
250
300
350
400
450
500
550
500
1000
1500
3000
4500
6000
Distance x [mm]
Pe
rm
is
si
bl
e
ra
di
al
fo
rc
e
F
r
[N
]
Maximum axial force: F
amax
= 48 N
F
rmax
(Smooth shaft)
F
rmax
(Keyed shaft)
Av
er
ag
e
sp
ee
d
n
av
g
[r
pm
]







































































