


18
français
6
Interface IO-Link (suite)
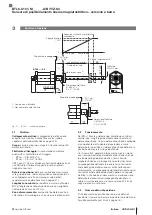
6.6.9 Output Characteristic
Ce paramètre détermine la fonction d’émission du BTL
avec courbe caractéristique croissante ou décroissante.
L’accès a lieu via le subindex 0.
Valeur
Fonction d’émission
0×00 (FALSE) Décroissant (point zéro à l’extrémité de
la tige)
0×FF (TRUE)
1)
Croissant (point zéro à la tête
électronique)
1)
Paramètre par défaut
Tab. 6-9 : Caractéristique d’émission
6.6.10 Magnet Mode
Le nombre de capteurs de position peut être réglé de
manière fixe ou flexible.
Réglage fixe du nombre de capteurs de position
Pour le réglage fixe d’un ou de deux capteur(s) de position,
le BTL vérifie constamment le nombre de capteurs de
position détectés. Si ce nombre ne coïncide pas avec le
préréglage, l’application se trouvera en état d’erreur :
toutes les valeurs de données de processus seront
remplacées par la valeur d’erreur.
Flexible Magnet Mode (FMM)
Avec le Flexible Magnet Mode, le nombre de capteurs de
position est flexible, si bien que celui-ci peut être modifié même
en cours de fonctionnement.
Le moment de l’ajout ou de la suppression d’un capteur de
position est critique car la détection doit de nouveau être
régulée et les contenus des valeurs de données de processus
peuvent éventuellement être déplacés. Dans ce cas précis, un
temps de diagnostic est défini et peut être configuré dans le
BTL. Pendant ce temps, une valeur d’erreur est émise pour
toutes les variables de données de processus et un diagnostic
correspondant (avertissement) est transmis par IO-Link. Après
écoulement du temps de diagnostic, le nouvel état de
l’application est affiché.
Structure du paramètre
Le paramètre
Magnet Mode
se compose de deux valeurs
entières non signées de 8 bits : nombre d’aimants et
temps de diagnostic.
Pour le nombre d’aimants, les valeurs suivantes peuvent
être réglées :
0 = Nombre d’aimants flexible (1 ou 2)
1 = 1 capteur de position (réglé de manière fixe)
2 = 2 capteurs de position (réglés de manière fixe)
Le temps de diagnostic se règle par paliers de 4 ms
comme suit :
1
= 4 ms
2
= 8 ms
…
255 = 1,02 s
Accès au paramètre
L’accès au paramètre est possible comme suit :
– Subindex 0 : Byte 1 = temps de diagnostic
Byte 0 = FMM
– Subindex 1 : Magnet Mode
– Subindex 2 : Temps de diagnostic
6.6.11 PD In Mapping
Ce paramètre est destiné à mapper les informations
souhaitées sur le PDV (voir
,
page 14). Chaque PDV peut être configurée par le
subindex correspondant.
Un entier non signé de 8 bits est attribué à chaque PDV en
tant que valeur de mapping. Les possibilités suivantes sont
réglables :
Valeur
Désignation
0×00
Valeur de position capteur de position 1
0×01
Valeur de position capteur de position 2
0×10
Valeur de vitesse capteur de position 1
0×11
Valeur de vitesse capteur de position 2
0x30
Température actuelle de l’intérieur de
l’appareil
0x40
Différence entre capteur de position 1 et 2
0×FD
Module vide (émission en tant que valeur 0)
Tab. 6-10 : PD In Mapping
Messages d’erreur
Certains messages d’erreur signalant un paramétrage
erroné ont été enregistrés.
Code
d’erreur
Message d’erreur
0×8011
Index not available
0×8012
Subindex not available
0×8020
Service temporarily not available
0×8030
Value out of Range
0×8033
Parameter Length overrun
0×8034
Parameter Length underrun
0×8036
Function temporarily unavailable
Tab. 6-11 : Messages d’erreur relatifs à la spécification IO-Link
BTL6-U101-M _ _ _ _ -A/B/Y/Z-S4
Système de mesure de position magnétostrictif – modèle à tige
Summary of Contents for BTL6-U101-M****-A-S4 series
Page 2: ...www balluff com...
Page 3: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Betriebsanleitung deutsch...
Page 4: ...www balluff com...
Page 27: ...BTL6 U101 M_ _ _ _ A B Y Z S4 User s Guide english...
Page 28: ...www balluff com...
Page 51: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Notice d utilisation fran ais...
Page 52: ...www balluff com...
Page 75: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Manuale d uso italiano...
Page 76: ...www balluff com...
Page 99: ...BTL6 U101 M_ _ _ _ A B Y Z S4 Manual de instrucciones espa ol...
Page 100: ...www balluff com...
Page 123: ......