





























9.4 Process Dataset
9.4.1 Standard Data Processing Workflow
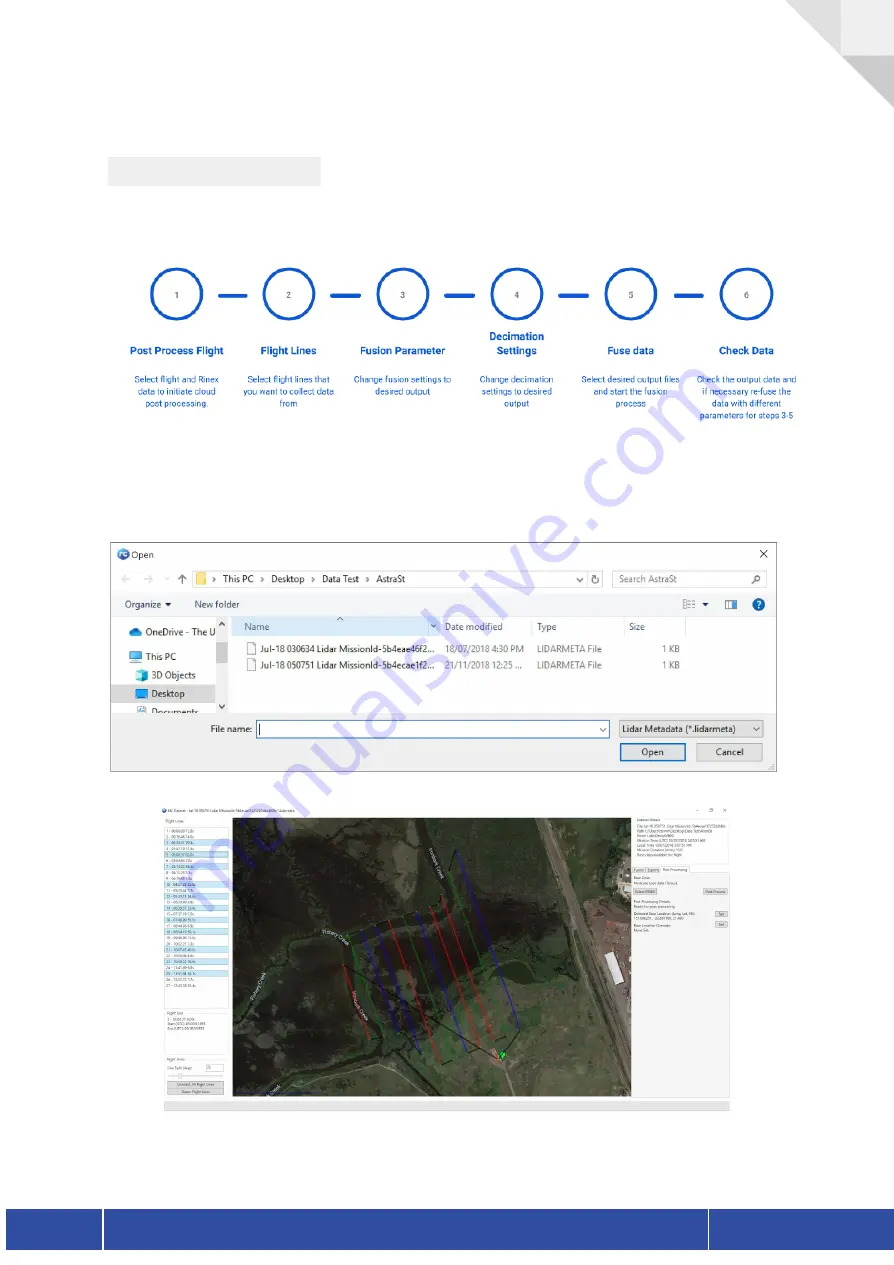
When choosing to process a single dataset you will be prompted to select the data that you
wish to process. Navigate to the directory within which your dataset is located and select the
appropriate lidarmeta file corresponding to the UTC time of the mission.
Version 1.1
NextCore RN50 User Guide
26
Summary of Contents for NextCore RN50
Page 1: ......