





























Flight height must be higher than obstacles around. Best practice for ensuring safe operation is
to fly a smaller drone (DJI Phantom 4, or DJI Mavic) and check for clearance at set altitudes. A
good dataset can be collected between 20m and 50m, usually, about 30-40m is best choice.
Flying lower concentrates data directly underneath the flight lines, but gets better side aspect
on vegetation and structures. Flying higher gets a more vertical aspect and better vegetation
penetration (esp off flight line centre), but flying too high can induce ranging errors and induce
IMU errors. 80m is a maximum altitude to get LiDAR returns.
Yawing should be avoided for the most part, mission grids should be flown with a consistent
heading (no yaw at end of lines). If for coverage reasons two aspects are required, do a grid
with one heading and then another grid at 90 degrees, with one yaw change between the two.
If including yaw during a manual flight, smooth consistent changes are preferred.
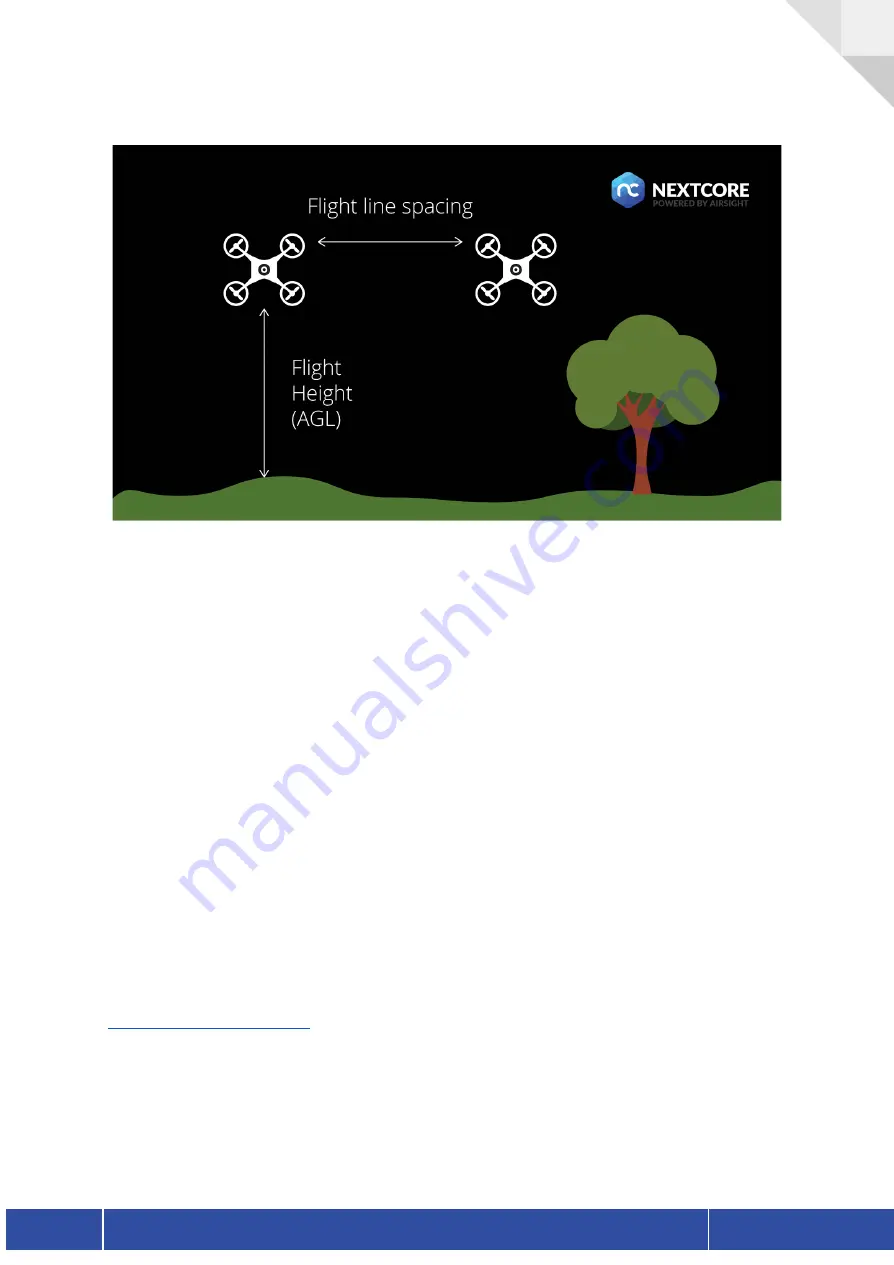
Optimal flight operation utilises the following parameters:
●
Consistent flight height (AGL)
●
Consistent UAV heading
In order to achieve this NextCore recommends flight mission planners that allow for terrain
following and single directional orientation. The NextCore team use the app Drone Harmony
for mission planning, though other applications may be suitable.
Version 1.1
NextCore RN50 User Guide
16
Summary of Contents for NextCore RN50
Page 1: ......







































































