





























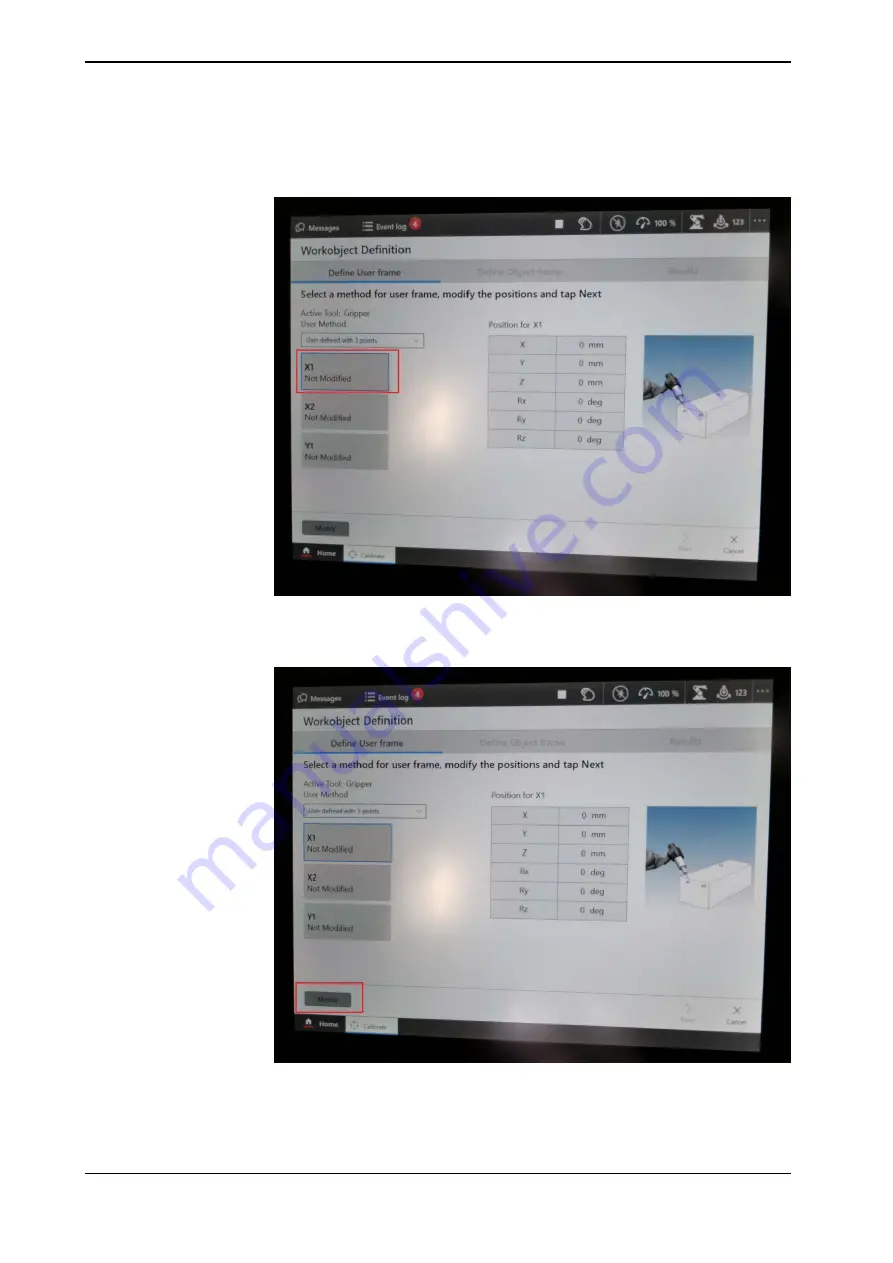
6 Select
X1
. Point out a location on the x-axis close to the origin with the robot's
TCP.
xx2100000383
7 Press
Modify
.
xx2100000384
8 Select
X2
. Move the TCP a distance in the direction the x-axis. Point out a
location on the x-axis with the robot's TCP.
Continues on next page
228
Application manual - PickMaster® Twin - PowerPac
3HAC064218-001 Revision: B
© Copyright 2021 ABB. All rights reserved.
4 Working with PickMaster PowerPac
4.3.6 Calibrating indexed work area
Continued
Summary of Contents for PickMaster Twin - PowerPac
Page 1: ...ROBOTICS Application manual PickMaster Twin PowerPac ...
Page 8: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 420: ...This page is intentionally left blank ...
Page 444: ...This page is intentionally left blank ...
Page 446: ...This page is intentionally left blank ...
Page 448: ...This page is intentionally left blank ...
Page 452: ......
Page 453: ......