





























4 Calibration
4.2. Relative calibration
3HAC021272-001 Revision: H
40
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
4.2. Relative calibration
What is relative calibration
Relative calibration is used to calibrate the base coordinate system of one robot, using a robot
that is already calibrated. This calibration method can only be used for a MultiMove system
where two robots are placed close enough to have some part of their working areas in
common.
If one robot has a base coordinate system that is identical with the world coordinate system,
this robot can be used as a reference for another robot. If no robot has a base coordinate
system that is identical with the world coordinate system, the base coordinate system for one
robot must be calibrated first. For information about other calibration methods, see Operating
manual - IRC5 with FlexPendant.
How to perform relative calibration
The tools for both robots must be correctly calibrated before using relative calibration, and
those tools must be active during calibration.
Action
Info/illustration
1. In the ABB menu, select Calibra-
tion.
2. Tap on the robot you want to
calibrate.
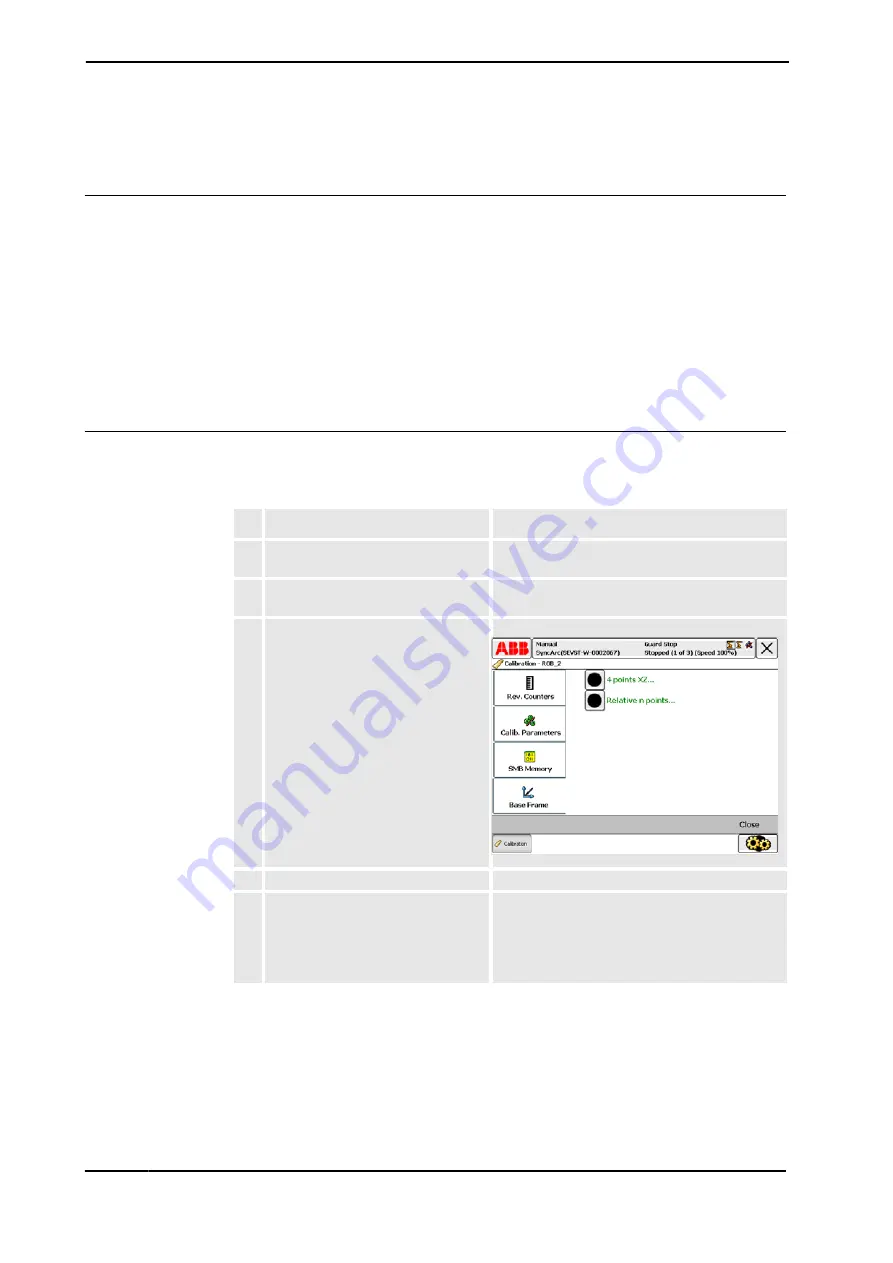
3. Tap Base Frame.
en0400000790
4. Tap Relative n points.
5. If you have more than two robots,
you must select which robot to use as
reference.
If you only have two robots, this step
is skipped.
Continues on next page







































































