





























4 Calibration
4.1. Calibration overview
39
3HAC021272-001 Revision: H
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
4 Calibration
4.1. Calibration overview
Two types of calibration
There are two types of calibration that must be done for a robot system:
1. Joint calibration ensures that all axes are in correct position. Normally this is done
before delivery of a new robot and only requires recalibration after repairing the robot.
For more information, see the product manual for the respective robot.
2. Calibration of coordinate systems must be made when the robot is in place. A brief
description of what coordinate systems to calibrate and in which order is presented
below.
Calibrate coordinate systems
First of all you must decide what coordinate systems to use and how to place their origins and
directions. For examples of suitable coordinate systems, see
Examples of coordinate systems
.
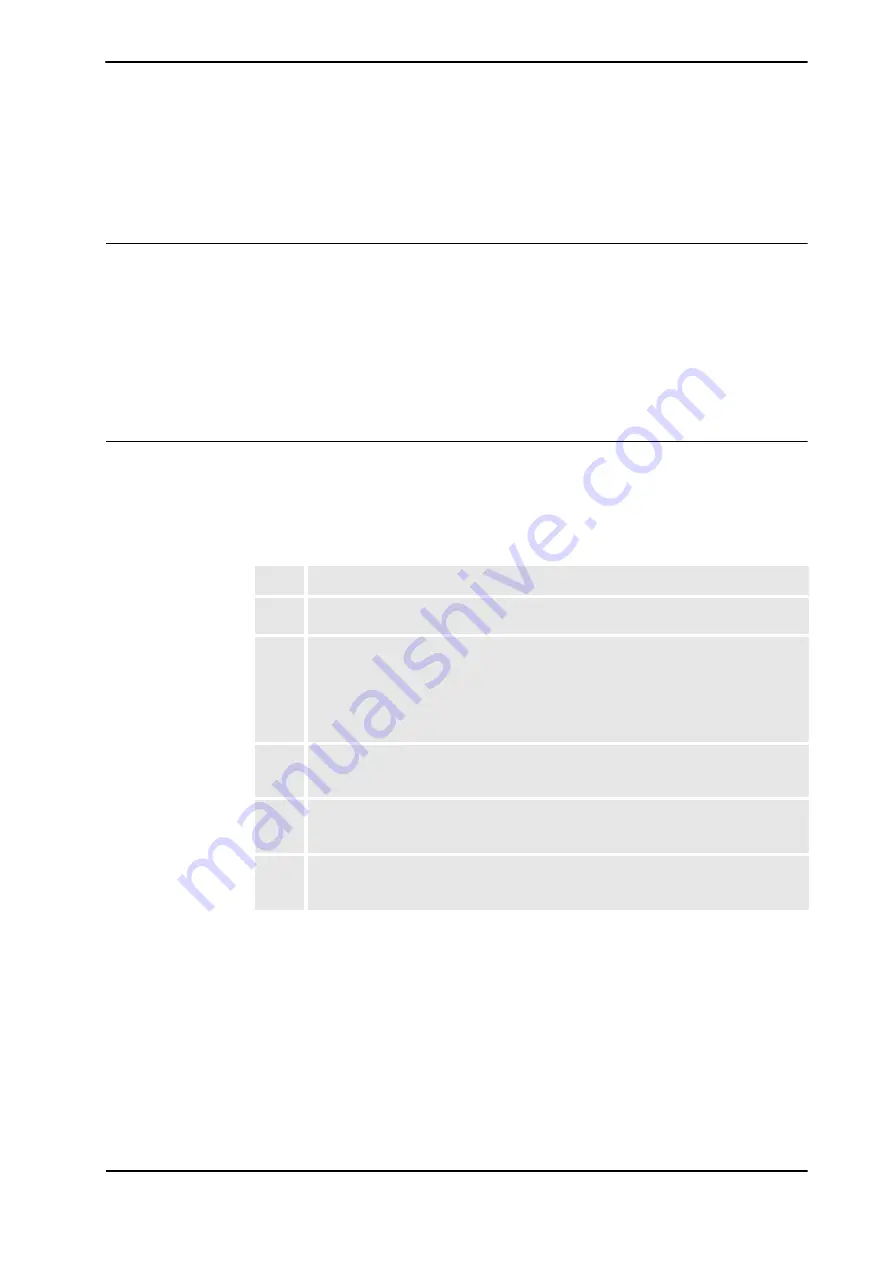
The coordinate systems are then calibrated in the following order:
Action
1. Calibrate the tool. This includes calibration of TCP and load data. For description of
how to calibrate the tool, see Operating manual - IRC5 with FlexPendant.
2. Calibrate the base coordinate system, relative to the world coordinate system, for all
the robots. For description of how to calibrate the base coordinate system for a robot,
see Operating manual - IRC5 with FlexPendant.
If one robot already has a calibrated base coordinate system, the base coordinate
system for another robot can be calibrated by letting the TCPs of the two robots meet
at several points. This method is described in
Relative calibration on page 40
3. Calibrate the base coordinate systems, relative to the world coordinate system, for
the positioners. For description of how to calibrate the base coordinate system for a
positioner, see Application manual - Additional axes and stand alone controller.
4. Calibrate a user coordinate system, relative to the world coordinate system. For
description of how to calibrate a user coordinate system, see Operating manual -
IRC5 with FlexPendant.
5. Calibrate an object coordinate system, relative to the user coordinate system. For
description of how to calibrate an object coordinate system, see Operating manual
- IRC5 with FlexPendant.

































































