





























2 Installation and commissioning
2.6.1. Installation of IRB4400 in a water jet application
3HAC022032-001 Revision: E
82
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
Pressurize the motors and serial measurement board cavity
The robots are prepared with hoses to the motors and the serial measurement board cavity to
enable pressurizing of them.
The robot must be pressurized also when it is switch off, to avoid that the humid
environmental air is sucked into the motors when cooling down.
Protecting from high pressure water
No part of the robot should be exposed to direct high pressure jet of water. The sealings
between the moving parts on the wrist should not be exposed to direct or rebounding high-
pressure jet of water.
Protecting the wrist joints
The sealings between the moving parts on the wrist should not be exposed to direct high-
pressure water. We recommend that the gripper include a shield that prevents direct water
flush on the sealing surfaces of the wrist. The sealings are pointed out in the illustration
below.
Action
Note/Illustration
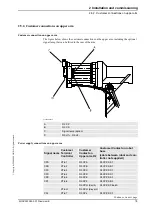
1. Connect a compressed air hose to air
connector on robot base, see illustration.
xx0600003107
•
A: connection to motors
2. Protect the screws on the Harting
connectors on the robot base from
corrosion with Mercasol 3106.
Do this when the controller cables are
connected.
3. Pressurize the robot.
See
Air specification for pressurizing of
for correct pressure.
4. Inspect the air system.
See
Inspection of air hoses (Foundry
.
Continued
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......



































































