




























7 Part list
7.1. Introduction
281
3HAC022032-001 Revision: E
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
7 Part list
7.1. Introduction
Overview
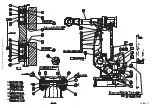
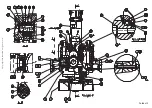
This section specifies all the replacement articles of the robot. The parts are shown in
exploded views or in foldouts, either in this or in a separate chapter.
Specific spare parts are listed separately in a Spare part list.
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......


































































