





























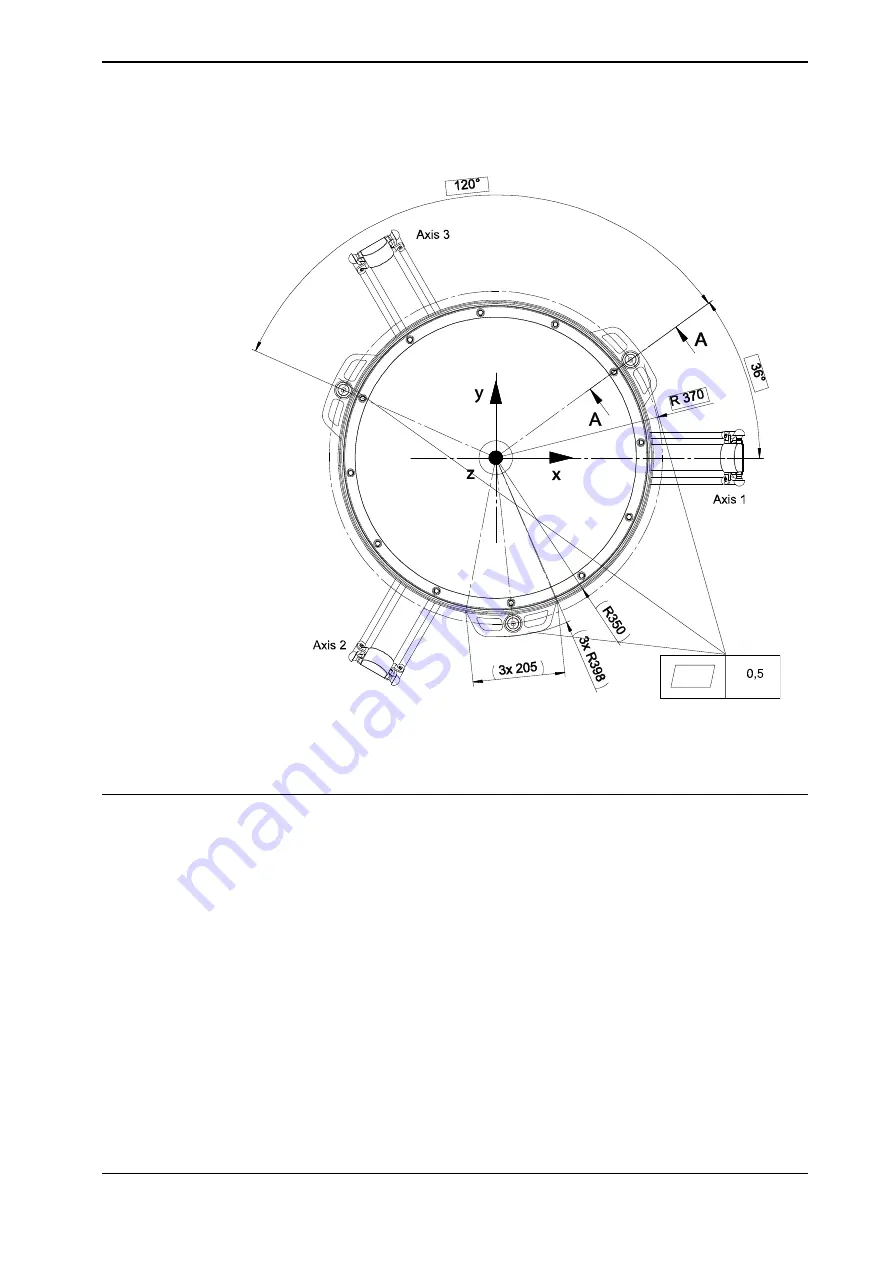
Illustration
en0900000413
The three support points of the manipulator base box shall be mounted against
three flat surfaces within the specification above. Shims is used if necessary.
Requirements, foundation
The following subsections show the requirements for the foundation regarding
stiffness and forces.
Stiffness of robot frame
The stiffness of the robot frame must be designed to minimize the influence on the
dynamic behavior of the robot. It is recommended that a frame with a lowest natural
frequency (with the robot mounted in the frame) higher than 17 Hz is used for robot
versions IRB 360 - 1/1130, IRB 360 - 3/1130, IRB 360 - 1/800, IRB 360 - 1/1600 and
a frame with a lowest natural frequency higher than 40 Hz is used for robot version
IRB 360 - 8/1130, IRB 360 - 6/1600. TuneServo can be used for adapting the robot
tuning to a non-optimal foundation.
Forces
Maximum force in each fixing point are 500 N referring to the z-direction in the
base coordinate system, regarding coordinate system see
Product
specification - IRB 360
. A robot frame is not included in the delivery.
Continues on next page
Product manual - IRB 360
51
3HAC030005-001 Revision: U
© Copyright 2008-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.1 Pre-installation procedure
Continued
Summary of Contents for IRB 360 Series
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 156: ...This page is intentionally left blank ...
Page 236: ...This page is intentionally left blank ...
Page 258: ...This page is intentionally left blank ...
Page 276: ...This page is intentionally left blank ...
Page 278: ...This page is intentionally left blank ...
Page 283: ......

































































