





























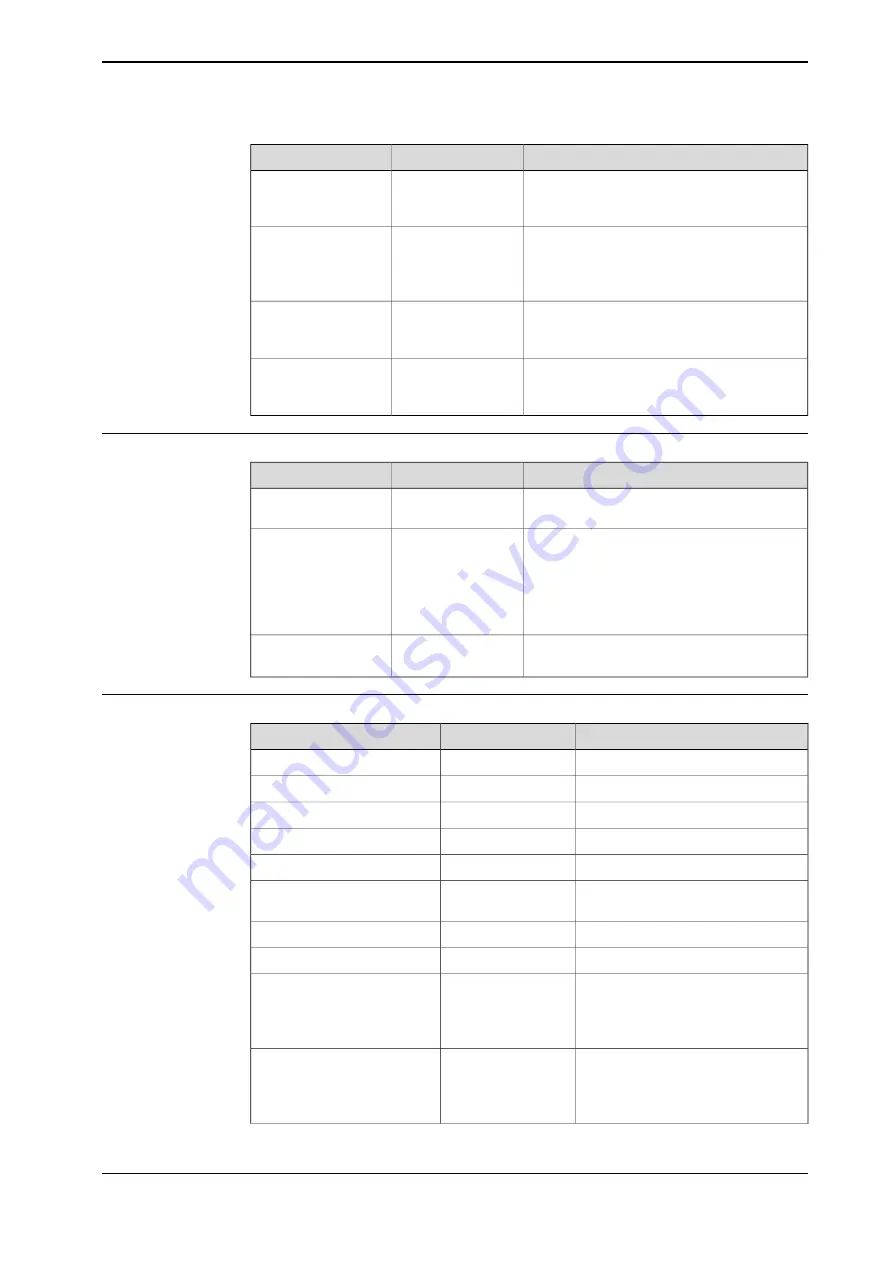
Description
Parameter name
Cfg name
The wait time (s) during a calibration before
the positional gun tip correction is done. Re-
commended value ca: 0.5 s.
Calibration Time
calib_time
Number of stored forces in the force VS motor
torque table. The minimum value allowed is
2.
Number of Stored
Forces
no_of_active_db_posts
Normally this is set to between 2 and 4.
Gun tip force 1 (N) - Gun tip force 10 (N).
Tip Forces 1 - 10
squeeze_force_1
-
squeeze_force_10
Motor torque 1 (Nm) - Motor torque 10 (Nm).
Motor Torque 1 - 10
squeeze_torque_1
-
squeeze_torque_10
Stress Duty Cycle
Description
Parameter name
Cfg name
The absolute highest motor speed to be used.
(rad/s)
Speed Absolute Max
speed_absolute_max
The absolute highest motor torque to be used.
(Nm)
Torque Absolute
Max
torque_absolute_max
If
torque_absolute_max
is too high, it may
result in a configuration error at restart. To
avoid this, make sure that:
torque_absolute_max
< √(3) *
ke
*
i_max.
Automatically reduce the max speed if there
is no more available current at higher speed.
-
speed_max_reduction_
active
Supervision
Description
Parameter name
Cfg name
Speed supervision should be On.
Speed Supervision
speed_supervision_on
Position supervision should be On.
Position Supervision
position_supervision_on
Counter supervision On.
Counter Supervision
counter_supervision_on
Jam supervision On.
Jam Supervision
jam_supervision_on
Load supervision On.
Load Supervision
load_supervision_on
Power up position supervision On,
default is Off.
Power Up Position
Supervision
power_up_position_on
Keep at default.
In Position Range
in_position_range
Keep at default.
Zero Speed (%)
normalized_zero_speed
Determines whether this joint effects
forced gain control.
Affects Forced Con-
trol
joint_affect_forced_Kp
Normally not used for servo gun.
Keep at default value.
The upper position limit for forced
gain control.
Forced on Position
Limit
Kp_forced_on_limit
Normally not used for servo gun.
Keep at default value.
Continues on next page
Application manual - Servo Gun Setup
63
3HAC065014-001 Revision: E
© Copyright 2021 ABB. All rights reserved.
4 System parameters
Continued
Summary of Contents for RobotWare 6
Page 1: ...ROBOTICS Application manual Servo Gun Setup ...
Page 6: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 56: ...This page is intentionally left blank ...
Page 66: ...This page is intentionally left blank ...
Page 78: ...This page is intentionally left blank ...
Page 80: ......
Page 81: ......





















































