





























Page 24 Non-Sound Decoder MX618 - MX638 and Sound Decoder MX640 - MX659
CV
Denomination
Range
Default Description
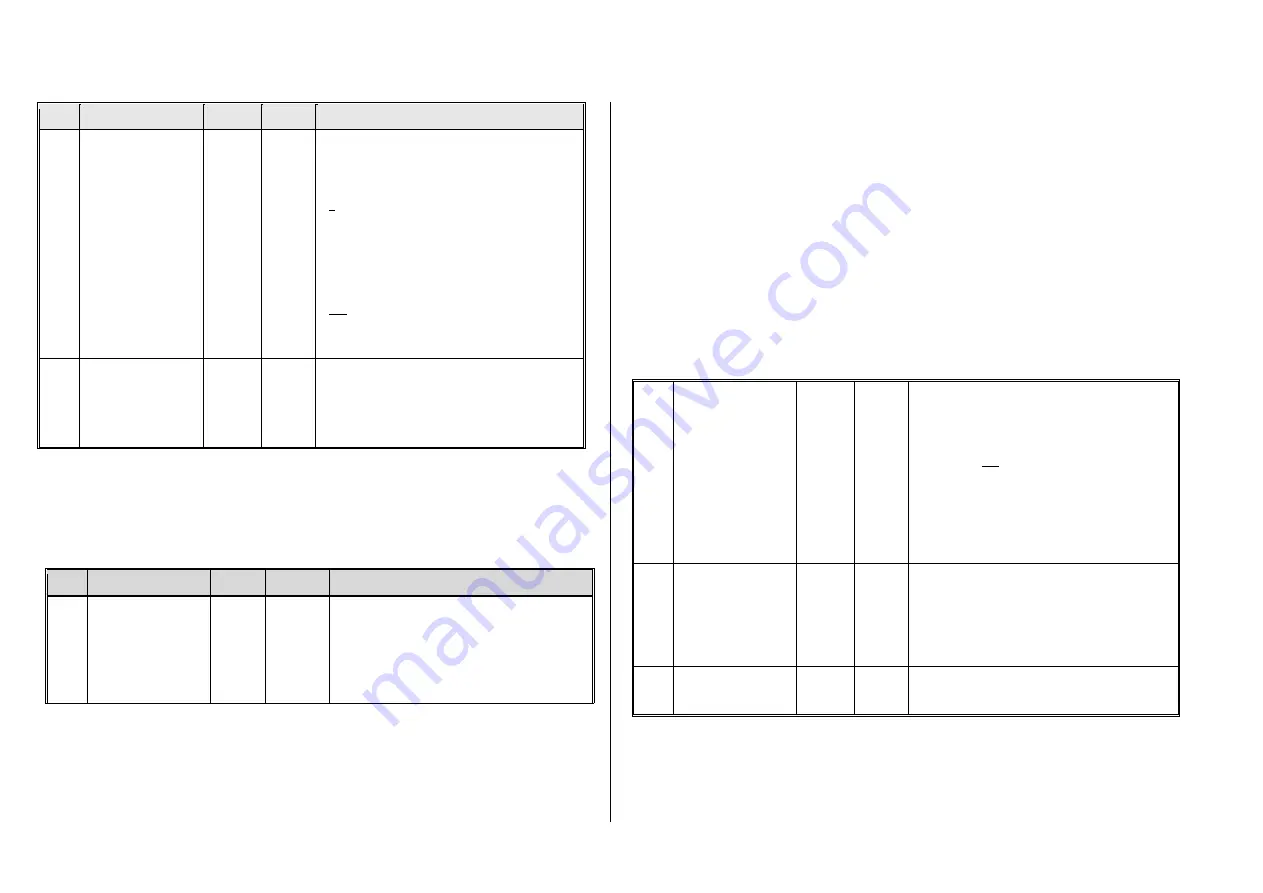
#134
Asymmetrical
threshold
for
stopping with
asymmetrical DCC signal
(Lenz ABC method).
1 - 14,
101 - 114,
201 - 214
=
0,1 - 1,4 V
106
Hundreds digit: Sensitivity adjustment, improves the
asymmetric-recognition by changing the speed with
which the asymmetry is being recognized.
= 0: fast recognition (but higher risk of errors,
may lead to unreliable stopping).
= 1: normal recognition (@ 0.5 sec.), fairly
reliable (default).
= 2: slow recognition (@ 1 sec.), very reliable.
Tens and ones digit: Asymmetrical threshold in tenths
of a volt. The voltage difference between the two half
waves of the DCC signal defines the minimum required
to be recognized as asymmetrical that starts the in-
tended effect (usually braking and stopping of a train).
= 106 (Default) therefore means normal recognition at
0.6 V asymmetry. This value has proven itself to be ap-
propriate under normal conditions; by using 4 diodes to
generate the asymmetry.
#142
High-speed correction
for the ABC
asymmetrical stop
method
0 - 255
12
A delayed recognition (see CV #134), but also unrelia-
ble electrical contact between rails and wheels, have a
larger effect on a stop point at higher speeds than at
lower speeds. This effect is corrected with CV #142.
= 12: Default. This setting usually works fine with the
default setting in CV #134.
3.11 DC Brake Sections,
“Märklin brake mode”
These are the “classic” methods of automated speed influence or stopping at a “red” signal. The re-
quired settings for ZIMO decoders are spread over several CV’s.
CV
Denomination
Range
Default
Description
#29,
#124,
#112
Single Bits in each of
these CV’s are
responsible for the
correct reaction to the
DC and Märklin brake
sections.
-
-
When using track polarity dependent
DC brake
sections
set
CV #29, Bit 2 = “0” and CV 124, Bit 5 = “1”!
For polarity independent DC braking (
Märklin brake
sections
) set
CV #29, Bit 2 = “0” and CV 124, Bit 5 = “1” and
addi
tionally CV #112, Bit 6 = “1”!
3.12 Distance controlled stopping
–
Constant stopping distance
After the type “constant stopping method” has been selected with
CV #140 (= 1, 2, 3, 11, 12, 13)
the stopping distance will be kept as close as possible to the one defined in
CV #141,
independent of the current speed at the start of the braking sequence.
This method is especially suitable in connection with automated stops in front of a red signal with the
help of the
signal controlled speed influence (ZIMO-HLU)
or the
asymmetrical DCC-signal (Lenz-
ABC).
CV #140 is set to 1 or 11 for this purpose.
Although of lesser practical value, distance controlled stopping for
manual driving
can also be acti-
vated (by programming CV #140 with appropriate values of 2, 3, 12, or 13), which is executed when-
ever the speed is set to 0 (by the cab, throttle, computer...).
#140
Distance controlled
stopping
(constant stopping
distance)
Select a braking method
and braking process
0 - 255
0
Activates distance controlled stopping as per CV #141
instead of time-constant braking according to CV #4.
= 1: automatic stops with ZIMO HLU (signal controlled
speed influence) or ABC (asymmetrical DCC signal).
= 2: manual stops using the cab.
= 3: automatic and manual stops.
The start of braking is delayed in all cases above (= 1, 2
or 3) when the train travels at less than full speed, to
prevent unnecessary long “creeping” (recommended).
On the other hand:
= 11, 12, 13 same meaning as above, but braking
always starts immediately after entering the brake sec-
tion.
#141
Distance controlled
stopping
(constant stopping
distance)
Distance calculation
0 - 255
0
This CV defines the “constant stopping distance”. The
right value for the existing braking sections has to be
determined by trial & error.
Use these figures as a starting point:
CV #141 = 255 is about 500m (547 yards) for a
real train or 6m (20 ft) in HO.
CV #141=50 about 100 m (109 yards) for a
real train or 1.2m in H0 (4 ft.).
#143
Distance controlled
stopping, compensation
using the HLU method
0 - 255
0
The HLU method is more reliable than the ABC method;
no recognition delay is usually required in CV #143; this
CV can remain at default value 0.
The distance controlled stopping can take place in two possible ways; see diagram below:
The first
is
the
recommended method (CV #140 = 1, 2 ,3),
where a train entering at less than full speed contin-
ues at the same speed for some time before it starts braking at a “normal” deceleration rate (same
rate as would be applied at full speed).
In the second method (CV #140 = 11, 12, 13), the train immediately starts braking when entering the
stop section, even when entering at a lower speed, which may lead to an un-prototypical behavior. It







































































