34
11.8.2
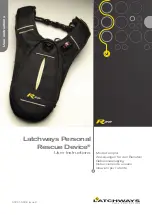
Force profiles
Gripping in the direction of WorkPosition
Modes 60 and 70 can be used for form-fit
gripping.
WorkPosition
Speed [%]
GripVelocity
(calculated)
BasePosition
Position [mm]
PositionTolerance (PT)
PT
PT
PT
PT
PT
TeachPosition
The gripping force is built up by the movement
speed of the product and the motor current.
The product calculates the required GripVe-
locity automatically from the GripForce
parameter.
When gripping a workpiece, an independent
mechanical locking system is triggered that
makes it possible to hold the workpiece
de-energized. To release the mechanical
system, an unlocking operation must be carried
out.
To unlock the mechanical system, the product
must be moved toward the standby position at
DriveVelocity. Then, the product switches into
positioning mode automatically.
The graphic shows outside gripping using
mode group 60 as an example. For Mode
Group 70, the BasePosition and the WorkPo-
sition are exchanged.
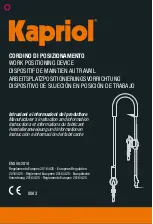
Opening
WorkPosition
Speed [%]
DriveVelocity
BasePosition
Position [mm]
PositionTolerance (PT)
PT
PT
PT
Parameter
Description
BasePosition
Open position
WorkPosition
Closed position
GripForce
Desired gripping force
TeachPosition
Expected position of the workpiece
PositionTolerance
Permitted tolerance for the workpiece
DriveVelocity
Opening speed
ShiftPosition
Not used
The movement profile determines the direction in which the workpiece is gripped:
• Outside gripping: Movement profile group 60
• Inside gripping: Movement profile group 70
INSTALLATION AND OPERATING INSTRUCTIONS:
GEH6000IL/GED6000IL
DDOC00212 / p
EN / 2022-05-01
Zimmer GmbH • Im Salmenkopf 5 •
77866 Rheinau, Germany •
+49 7844 9138 0 • www.zimmer-group.com