























5
ZABER TECHNOLOGIES INC.
/1 help move
@01 0 OK IDLE -- 0
#01 0 move abs {x} Move to absolute position
#01 0 move rel {x} Move by relative position
#01 0 move vel {x} Move at constant velocity
#01 0 move min Move to minimum position
#01 0 move max Move to maximum position
5. Device Overview
5.1. Connectors
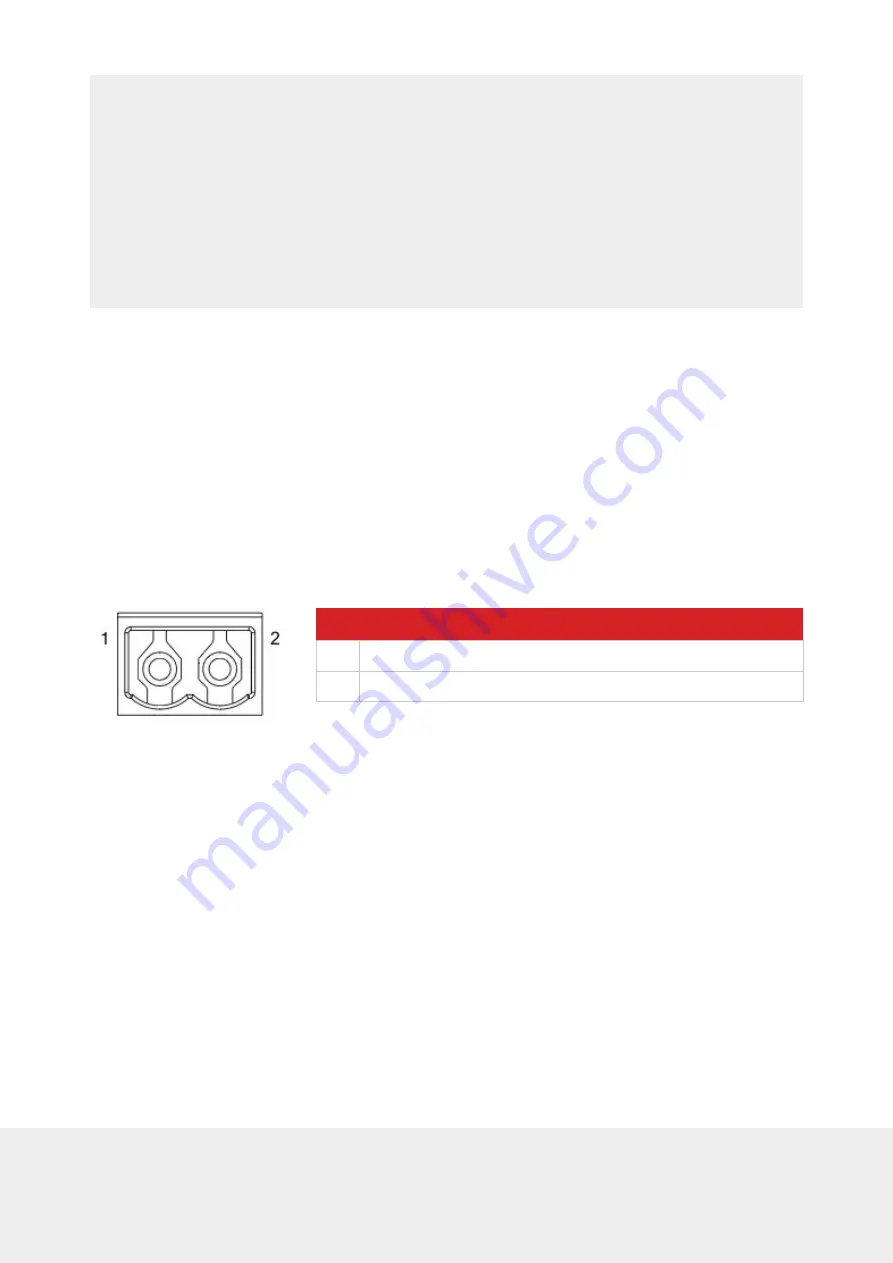
All images are shown looking into the device.
5.1.1. Power
Pin
Description
1
24 - 48V
2
GND (Note: Zaber's power supplies ground this pin to AC Earth)
Note: To prevent damage to the device due to static buildup, the device should be properly
grounded. The power supplies Zaber provides for X-Series devices are non-isolated and thus
ground the device chassis to Earth via the negative terminal of the power supply. If for any reason
you are using an isolated power supply, please ensure your device is grounded by connecting the
negative terminal of the power connector to AC Earth.
Содержание X-MCB2 Series
Страница 4: ...III ZABER TECHNOLOGIES INC 16 3 Linux 16 4 OS X 17 Product Drawing 18 Specifications 54 55 56 57 ...
Страница 50: ...46 ZABER TECHNOLOGIES INC 5 Choose Browse my computer for driver software ...
Страница 51: ...47 ZABER TECHNOLOGIES INC 6 Click the Browse button and select the location where you extracted the driver to ...
Страница 52: ...48 ZABER TECHNOLOGIES INC 7 Click Next ...
Страница 60: ...56 ZABER TECHNOLOGIES INC 17 Product Drawing ...







































































