




























Installation
4
-
21
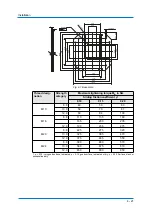
Fig. 4-1: Base plate
Thread desig-
nation
Strength
category
Maximum tightening torque M
A
in Nm
Sliding friction coefficient μ
1
1. μ = 0.10: very good surface, lubricated; μ = 0.15: good surface, lubricated or dry; μ = 0.20: Surface, black or
phosphatized dry
0.10
0.15
0.20
M10
8.8
40
50
60
10.9
59
73
87
12.9
69
84
100
M16
8.8
110
135
160
165
200
235
12.9
190
235
275
M20
8.8
225
275
320
10.9
325
395
470
12.9
375
465
550
M24
8.8
390
480
570
10.9
560
675
810
12.9
650
800
950
1000
1000
900
710
500
500
710
900
180 x 45°
320
385
230
400
8 x M20
360
360
0.2
30
5
12 x Ø26
8 x M16







































































