





























4
-6
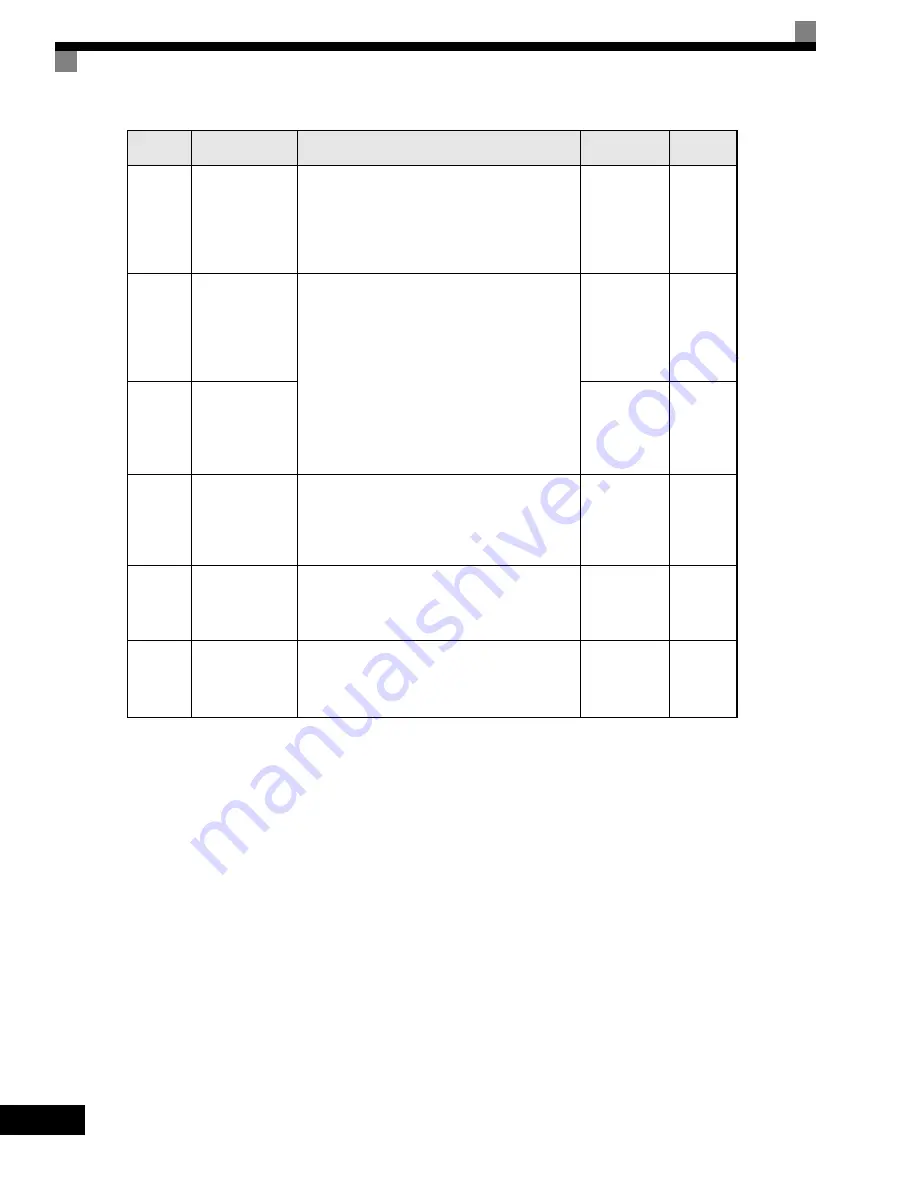
Table 4.2 Parameters that Are Set as Required
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
b1-03
Stopping method
selection
Select stopping method when stop command is
sent.
0: Deceleration to stop
1: Coast to stop
2: DC braking stop
3: Coast to stop with timer
0 to 3
0
C6-02
Carrier fre-
quency selection
The carrier frequency is set low if the motor cable
is 50 m or longer or to reduce radio noise or leak-
age current.
1 to F
Depends
on capac-
ity, volt-
age, and
control
mode.
C6-11
Carrier fre-
quency selection
for open-loop
vector control 2
1 to 4
Depends
on kVA
setting.
d1-01 to
d1-04 and
d1-17
Frequency refer-
ences 1 to 4 and
jog frequency ref-
erence
Set the required speed references for multi-step
speed operation or jogging.
0.00 to
400.00 Hz
d1-01 to
d1-04:
0.00Hz
d1-17:
6.00Hz
H4-02
and H4-
05
FM and AM ter-
minal output gain
Adjust when an instrument is connected to the FM
or AM terminal.
0.0 to 1000.0
H4-02:
100%
H4-05:
50%
L3-04
Stall prevention
selection during
deceleration
If using the dynamic brake option (braking resis-
tor, Braking Resistor Units, and Braking Units), be
sure to set parameter L3-04 to 0 (disabled) or 3
(enabled with braking resistor).
0 to 3
1
Содержание CIMR-G7U
Страница 2: ......
Страница 7: ...v...
Страница 32: ...1 18...
Страница 90: ...3 16...
Страница 112: ...4 22...
Страница 382: ...6 164...
Страница 410: ...7 28...
Страница 454: ......
Страница 455: ......







































































