















Appendix
v
2.
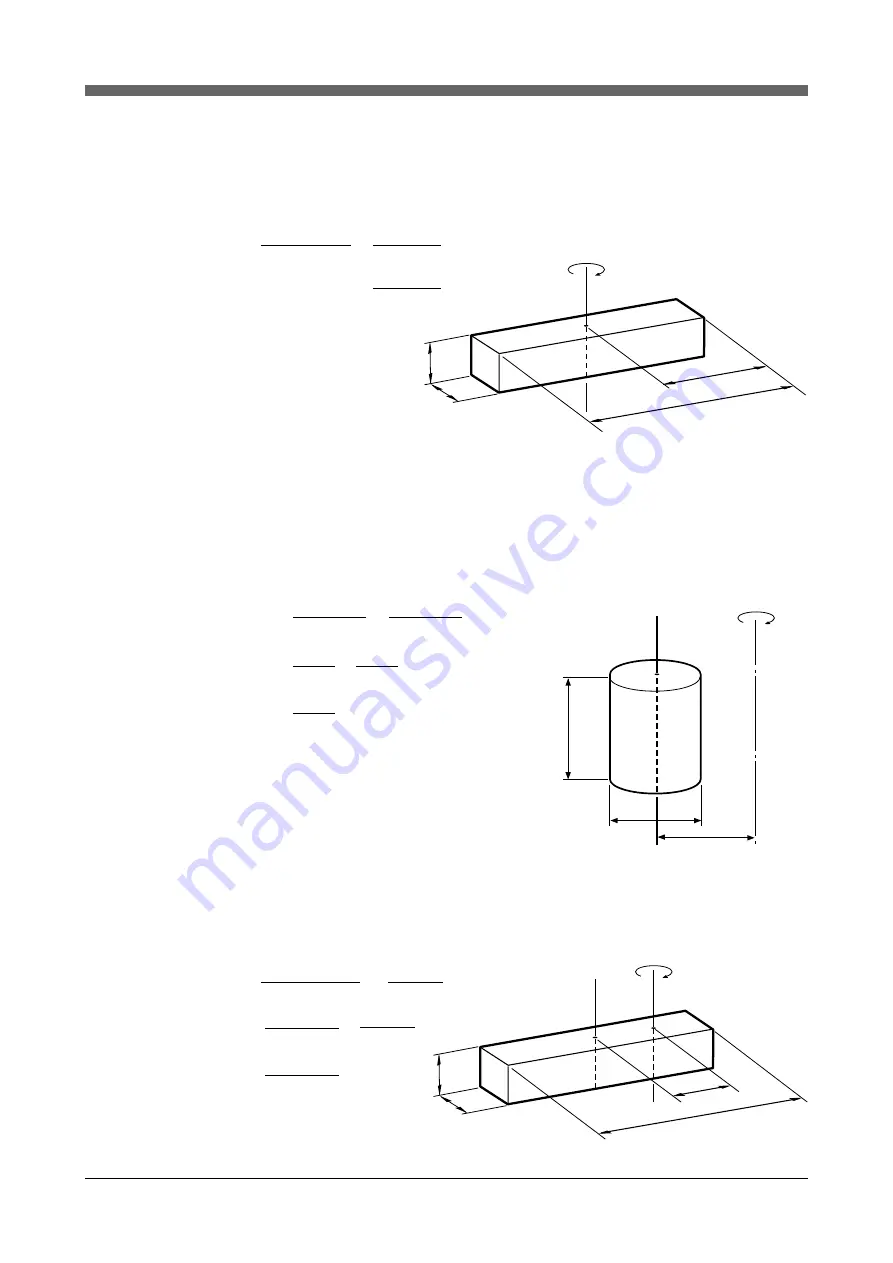
Moment of inertia for rectangular parallelepiped
The moment of inertia (J) for a rectangular parallelopiped having a rotation center as shown
below is given by
J =
ρ
abc (a
2
+ b
2
)
12g
W (a
2
+ b
2
)
12g
=
(kgf.cm.sec
2
)
m (a
2
+ b
2
)
12
=
(kgm
2
)
: Density (kg/cm
3
)
: Gravitational
acceleration (cm/sec
2
)
: Weight of prism (kgf)
: Mass of prism (kg)
a
c
b
1/2a
ρ
g
W
m
3.
When the object’s center line is offset from the rotation center.
The moment of inertia (J) when the center of the cylinder is offset by a distance “x” from the
rotation center as shown below is given by
D
h
J =
ρπ
D
4
h
32g
WD
2
8g
=
(kgf.cm.sec
2
)
: Weight of cylinder (kgf)
: Mass of cylinder (kg)
: Density (kg/cm
3
)
: Gravitational acceleration (cm/sec
2
)
x
+
ρπ
D
2
hx
2
4g
+
Wx
2
g
mD
2
8
=
mx
2
(kgm
2
)
+
center line
rotation
center
W
m
e
g
In the same manner, the moment of inertia (J) of a prism as shown below is given by
J =
ρ
abc (a
2
+b
2
)
12g
W(a
2
+b
2
)
12g
=
: Weight of prism (kgf)
: Mass of prism (kg)
a
c
b
x
center line
+
ρ
abcx
2
g
Wx
2
g
+
(kgf.cm.sec
2
)
m(a
2
+b
2
)
12
=
+ mx
2
(kgm
2
)
W
m
Содержание FLIP-X Series
Страница 1: ...User s Manual ENGLISH E YAMAHA SINGLE AXIS ROBOT E21 Ver 1 15 FLIP Xseries ...
Страница 2: ......
Страница 6: ...MEMO ...
Страница 10: ...MEMO ...
Страница 12: ...1 2 MEMO ...
Страница 24: ...1 14 MEMO ...
Страница 26: ...2 2 MEMO ...
Страница 66: ...3 2 MEMO ...
Страница 78: ...4 2 MEMO ...
Страница 98: ...4 22 MEMO ...
Страница 100: ...5 2 MEMO ...
Страница 120: ...5 22 MEMO ...
Страница 121: ...Chapter 6 Troubleshooting 6 1 Positioning error 6 3 6 2 Feedback error 6 4 ...
Страница 122: ...6 2 MEMO ...
Страница 125: ...Appendix About machine reference iii Equation of moment of inertia calculation iv ...
Страница 126: ...ii MEMO ...


































































