

















Appendix
iii
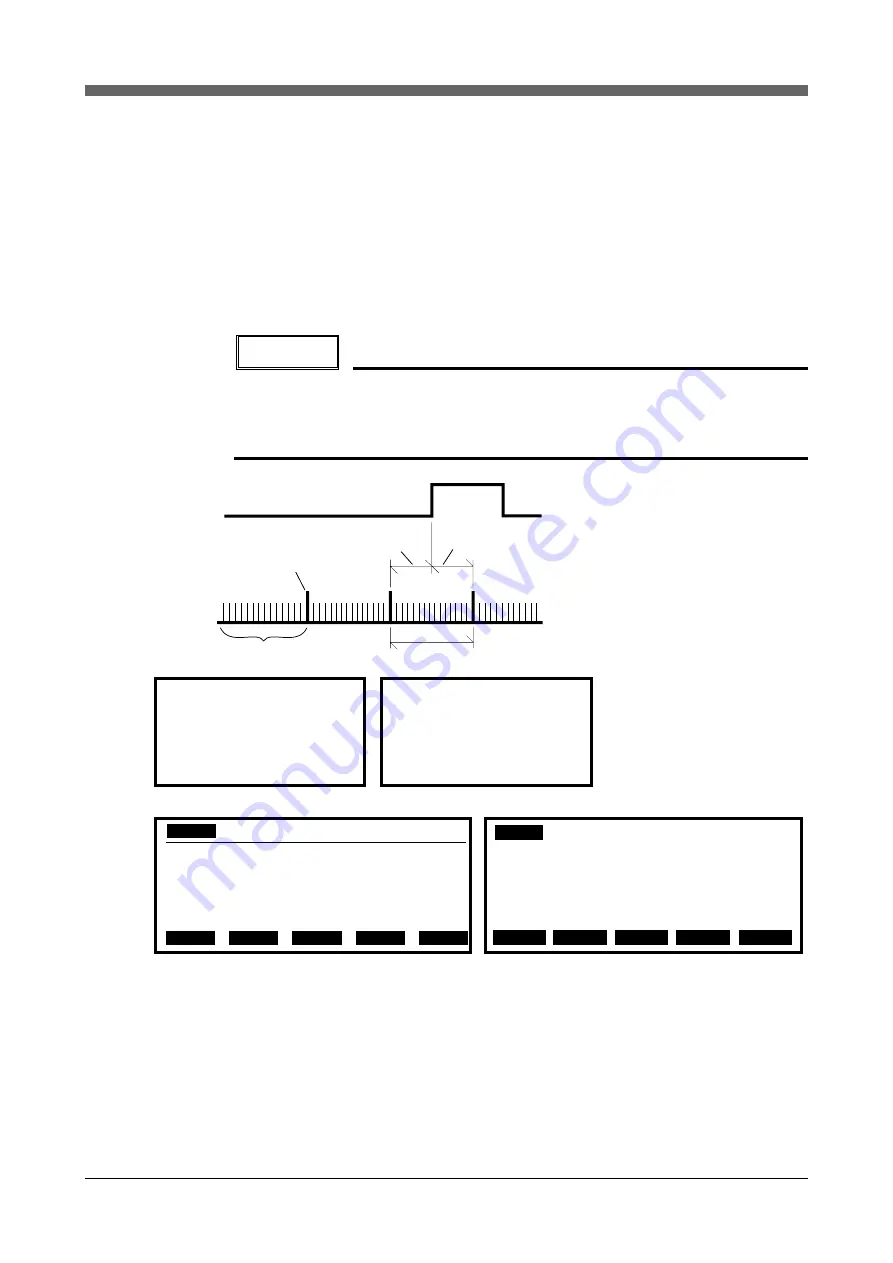
About machine reference
The position detector built into the motor issues a “0” pulse each time the motor rotates 1/4th of
one turn. When return-to-origin is performed, a difference in distance occurs between the posi-
tion where the origin signal is detected and the point at which the next “0” pulse is received. This
is called the machine reference and is usually expressed as a percent, with 100% being equal to 1/
4th of one turn of the motor. The machine reference value must be within the allowable range (25
to 75%) to maintain axis movement repeatability.
The machine reference value is displayed on the LCD screen of the programming unit (DPB or
MPB) when return-to-origin is complete. (See the figure below.)
NOTE
The FLIP-X series uses an absolute type position detector. You do not have to per-
form return-to-origin each time the robot controller is turned on and readjust the
machine reference value. If for some reason the machine reference adjustment
becomes necessary, please contact YAMAHA sales office or dealer.
MANUAL
50%
[S0H0]
Machine Reference (%)
M1= 51% M2= 57% M3= 51%
M4= 52%
POINT
ORIGIN
VEL+
VEL-
X = 5 0 %
Y = 5 0 %
[ O P R T – O R G ]
o r i g i n c o m p l e t e
m a c h i n e r e f .
5 0 %
[ O P R T – O R G ]
o r i g i n c o m p l e t e
m a c h i n e r e f .
QRCX (Multiple FLIP-X control)
DRCX (Two FLIP-X control)
SRCX
1/4th of one turn of motor
Zero signal
Pulse
Origin detection
signal
Machine reference
(Mark method)
Machine reference
(Stroke end method)
RCX40 (Multiple FLIP-X control)
MANUAL
50% [MG] [S0H0J]
-------------------------------------------------------------------------------
Machine Reference (%)
M3=
49
M1=
32
M4=
40
M2=
40
M1
M2
M3
M4
M5
>
ABS RESET
Содержание FLIP-X Series
Страница 1: ...User s Manual ENGLISH E YAMAHA SINGLE AXIS ROBOT E21 Ver 1 15 FLIP Xseries ...
Страница 2: ......
Страница 6: ...MEMO ...
Страница 10: ...MEMO ...
Страница 12: ...1 2 MEMO ...
Страница 24: ...1 14 MEMO ...
Страница 26: ...2 2 MEMO ...
Страница 66: ...3 2 MEMO ...
Страница 78: ...4 2 MEMO ...
Страница 98: ...4 22 MEMO ...
Страница 100: ...5 2 MEMO ...
Страница 120: ...5 22 MEMO ...
Страница 121: ...Chapter 6 Troubleshooting 6 1 Positioning error 6 3 6 2 Feedback error 6 4 ...
Страница 122: ...6 2 MEMO ...
Страница 125: ...Appendix About machine reference iii Equation of moment of inertia calculation iv ...
Страница 126: ...ii MEMO ...

































































