





























with creeping speed, search the
servo encoder Z phase in
forward direction after stop
SFD3040
+60*(N-1)
Return speed
VH
32-bit
integer
Pulse/
second
0
SFD3042
+60*(N-1)
Return speed
VL
32-bit
integer
Pulse/
second
0
SFD3044
+60*(N-1)
Creeping
speed
32-bit
integer
Pulse/
second
0
The two modes of return origin point:
1.
No Z phase signal mode
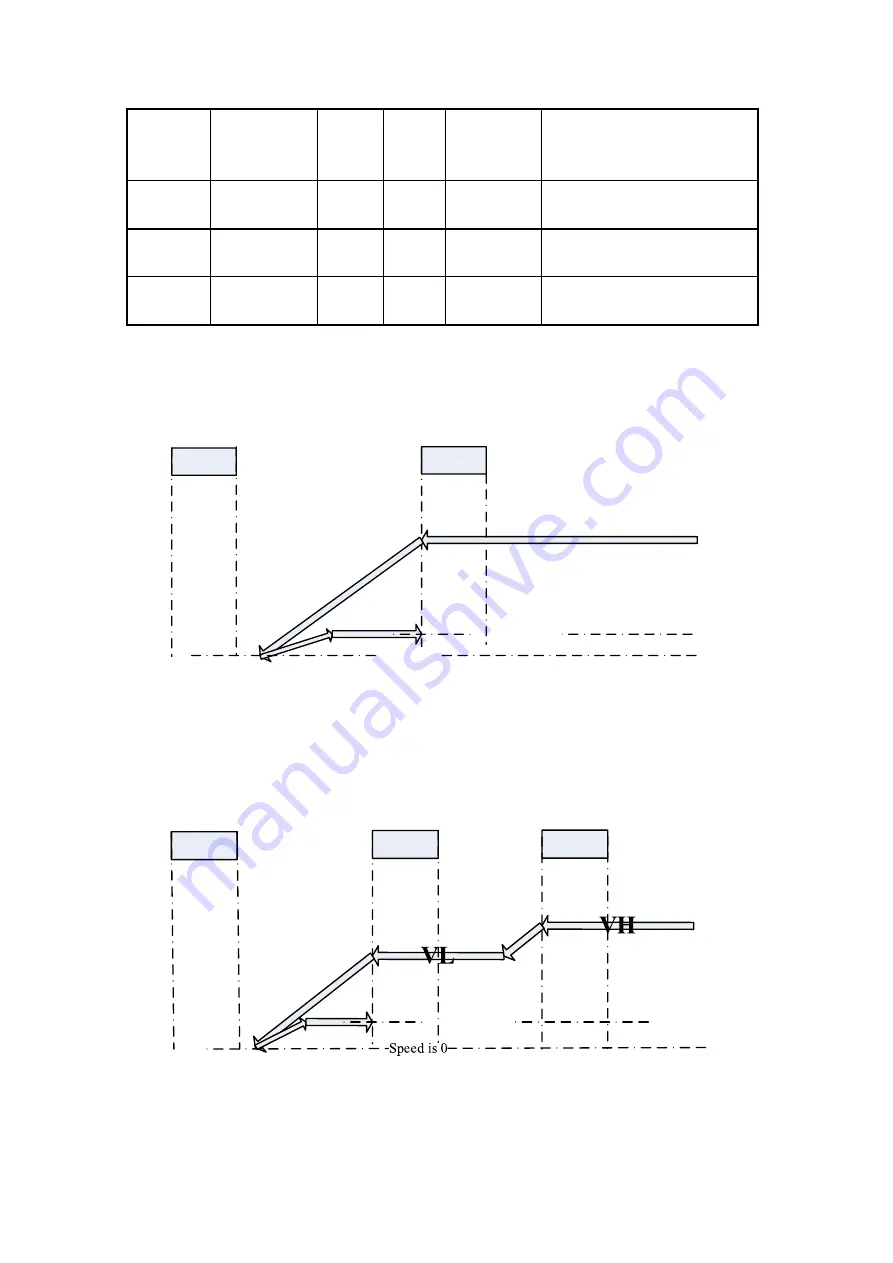
Return the origin point in reverse direction, no close signal:
VH
Speed is 0
limit
origin
Creeping speed
Motion description: the motor returned the origin with speed VH, when it touched the falling edge
of origin signal, the speed become zero, it returned origin in reverse direction with creeping speed,
and stop moving when touched rising edge of origin signal.
Return origin in reverse direction, there is close signal:
limit
origin
Creeping speed
Close
point
Motion description: the motor returned origin with speed VH, it touched close signal and the
speed changed to VL and continued returning origin, the speed become 0 when it touched falling
edge of origin signal, it returned origin in reverse direction with creeping speed, and stop moving
Содержание X-NET fieldbus
Страница 1: ...X NET fieldbus User manual Wuxi XINJE Electric Co Ltd Data No PD06 20151009 3 2...
Страница 28: ...SD169 Serial port 3 SD170 SD179 Serial port 4 SD180 SD189 Serial port 5 SD190 SD199...
Страница 56: ...d click the setting icon to open the setting panel Click write in PLC after setting...





















































