




























1-3)
S4
Target object address (refer to
chapter 1-3)
32 bits constant or double words register
S5
Access object numbers
16 bits constant or single word register
D1
Local object address
Local register
3. Suitable soft component
*Note: D includes D, HD; TD includes TD, HTD; CD includes CD, HCD, HSCD, HSD; DM
includes DM, DHM; DS includes DS, DHS.
M includes M, HM; S includes S, HS; T includes T, HT; C includes C, HC.
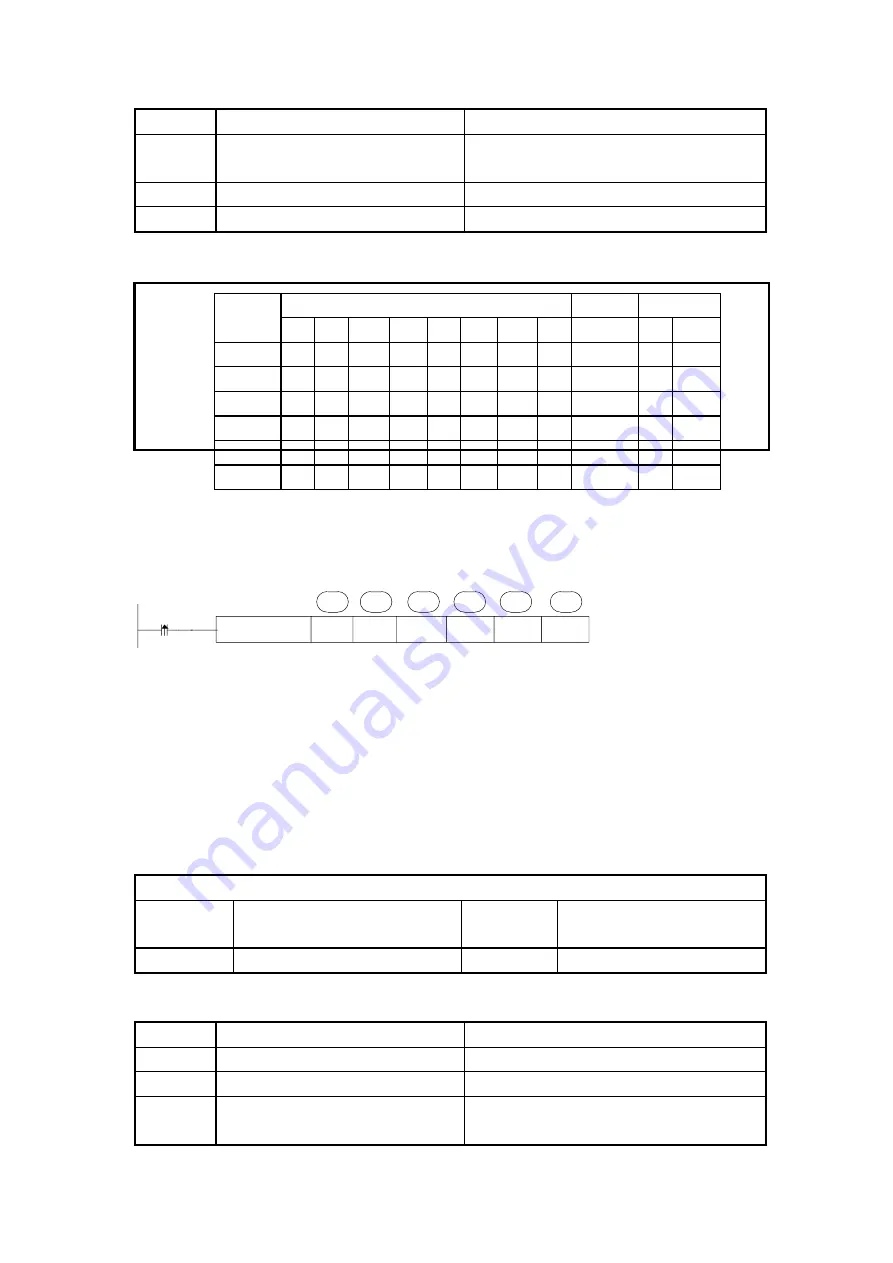
Intruction
REG_READ
K1
K2
K0
K10
X0
D0
S1·
S2·
S3·
S4·
S5·
K128
D1.
Function: read the station no.2 register D0~D9 to local address D0~D9 in ID1 network.
1-2-4
.
Write register [REG_WRITE]
1. Instruction explanation
Write the local register to target register.
Write register [REG_WRITE]
Execution
conditoin
Edge trigger
Suitable
model
XD3, XDM, XD5
Hardware
V3.2 and up
Software
V3.2 and up
2. Operand
Operand
Function
Type
S1
Target net ID
16 bits constant or single word register
S2
Target station number
16 bits constant or single word register
S3
Target object type (refer to chapter
1-3)
16 bits constant or single word register
Operand
System
Constant Module
D
*
FD
TD
*
CD
*
DX
DY
DM
*
DS
*
K /H
ID
QD
S1
●
●
●
●
●
S2
●
●
●
●
●
S3
●
●
●
●
●
S4
●
●
●
●
●
S5
●
●
●
●
●
D1
●
●
●
●
Word
Содержание X-NET fieldbus
Страница 1: ...X NET fieldbus User manual Wuxi XINJE Electric Co Ltd Data No PD06 20151009 3 2...
Страница 28: ...SD169 Serial port 3 SD170 SD179 Serial port 4 SD180 SD189 Serial port 5 SD190 SD199...
Страница 56: ...d click the setting icon to open the setting panel Click write in PLC after setting...






















































