























33
XciteRC Rocket 400 GPS
FR
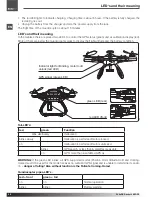
Mode émetteur
Mode émetteur
A noter: Au décollage, les interrupteurs doivent être en position „normal“
Mode
Inter. SWB (gauche) Inter. SWA (droite) LED émetteur
Normal
0
0
rouge
Position Hold
0
1
bleue
Flight Direction Locked
1
1
Altitude Hold
1
2
Coming Home
0
2
verte
DANGER:
Si la LED verte clignote, vous ne pouvez pas vous servir des modes gérés par le GPS (Posi-
tion Hold, et Coming Home) étant donné que le modèle ne capte pas de signal GPS correct pour déterminer
sa position -
Risque de Crash! Il en est de même pour la fonction Failsafe Coming Home qui ne
sera pas fonctionnelle, dans ce cas !
IMPORTANT:
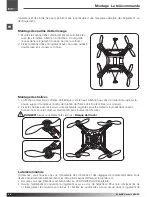
avant le premier vol, il faut d’abord calibrer le magnétomètre intégré. Procédez
de la manière suivante:
• Allumez le Quadrocoptère. Les LEDs à l’arrière clignotent alternativement à un rythme rapide. Allumez
maintenant l’émetteur.
• Mettez les interrupteurs SWA et SWB en position 0.
• Placez le Quadrocoptère sur une surface plane et faites-le tourner sur lui-même au moins huit fois. Au
bout de la huitième fois, il devrait se retrouver dans sa position de départ.
• Déplacez maintenant l’interrupteur SWA durant cinq secondes alternativement de la position 0 en positi-
on 1, c’est à dire 0
1
0
1
0
1 et ainsi de suite.
• Le calibrage est terminé, dès que les LEDs à l’arrière restent allumées en permanence.
Mode de vol
Normal:
Vol normal sans GPS ou sans contrôle de l’altitude. Si ce mode est activé, la LED rouge de
l’émetteur est allumée.
Position Hold:
Allez à l’endroit souhaité dans une position stable et mettez l’interrupteur dans la position
correcte, puis mettez le manche de commande des gaz au milieu. Le modèle maintiendra sa position actuelle
et effectuera automatiquement les corrections de vol nécessaires.
A noter:
Selon la force du vent, le modèle
aura besoin de plus ou moins de place jusqu’à ce qu’il se stabilise. N’utilisez cette fonction que si l’espace
aérien disponible est suffisamment grand – c’est à dire pas trop près d’obstacles, tels que des arbres ou des
habitations –
Risque de collision!
A noter:
par des ordres de commande avec des débattements importants, vous pouvez „écraser“ cette
fonction et reprendre manuellement le contrôle du modèle.
Si ce mode est activé, la LED bleue de l’émetteur reste allumée, de plus un Bip sonore retentit.
Coming Home:
Pour activer ce mode, placez le nez du modèle en direction du point de décollage puis
mettez les interrupteurs dans la position correcte. Si le modèle évolue à une altitude de plus de 15 m, il
rejoindra directement son point de décollage. S’il est plus bas, il remontera, pour des raisons de sécurité, à
15 m avant de rejoindre son point de décollage. Au dessus du point de décollage (position dans laquelle les
moteurs ont été démarrés, le modèle maintiendra durant quelques secondes son altitude, avant d’entamer
une lente descente.
A noter:
avant d’activer ce mode, placez le modèle dans une position stationnaire stable, avec le nez du
modèle en direction du point de décollage. Dès que le modèle est posé, les moteurs se coupent automati-
SWB
1
0
SWA Mode ON/OFF
SWB Mode ON/OFF
0
1
2
SWA
Содержание ROCKET400
Страница 25: ...25 XciteRC Rocket 400 GPS EN Cd Hg Pb Li Po Cd cadmium Pb plumbium Hg mercury Li lithium...
Страница 41: ...41 XciteRC Rocket 400 GPS...
Страница 42: ...42 XciteRC Rocket 400 GPS...
Страница 43: ...43 XciteRC Rocket 400 GPS...































































