





























12
On-screen Editors
12.1
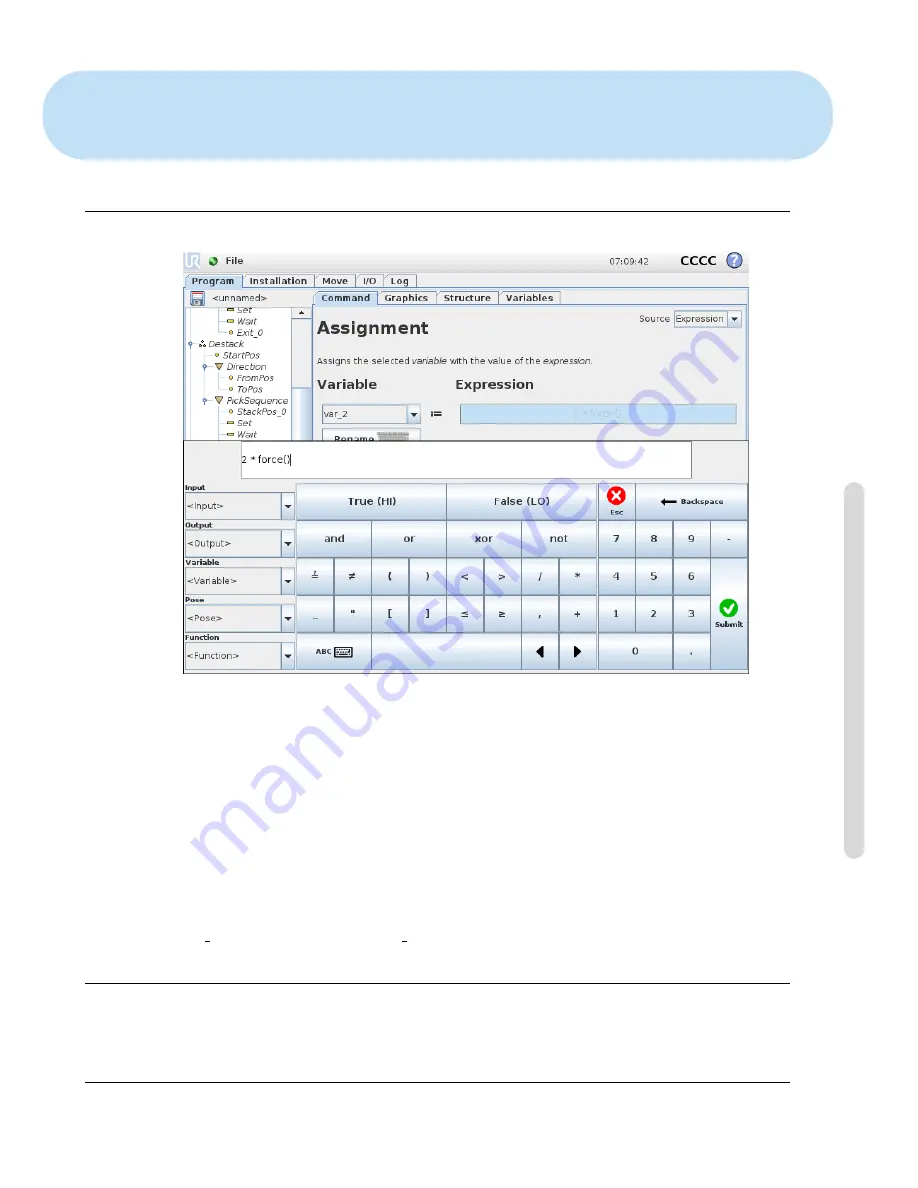
On-screen Expression Editor
While the expression itself is edited as text, the expression editor has a number of buttons and
functions for inserting the special expression symbols, such as
∗
for multiplication and
≤
for less
than or equal to. The keyboard symbol button in the top left of the screen switches to text-editing of
the expression. All defined variables can be found in the
Variable
selector, while the names of the
input and output ports can be found in the
Input
and
Output
selectors. Some special functions
are found in
Function
.
The expression is checked for grammatical errors when the
Ok
button is pressed. The
Cancel
button leaves the screen, discarding all changes.
An expression can look like this:
digital in[1]
?
=
True and analog in[0]<0.5
12.2
Pose Editor Screen
On this screen you can specify target joint positions, or a target pose (position and orientation) of
the robot tool. This screen is “offline” and does not control the robot arm directly.
Version 3.10
Cop
yr
ight
©
2009–2019
b
y
Univ
ersal
Robots
A/S
.
All
rights
reser
v
ed.
II-33
CB3
Содержание UR3/CB3
Страница 1: ...Universal Robots UR3 CB3 Original instructions en US version...
Страница 2: ......
Страница 3: ...Universal Robots UR3 CB3 Euromap67 Version 3 10 Original instructions en US Version...
Страница 12: ...UR3 CB3 x Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 15: ...Part I Hardware Installation Manual...
Страница 16: ......
Страница 36: ...UR3 CB3 I 22 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 42: ...4 4 Maximum Payload UR3 CB3 I 28 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 62: ...5 7 Robot connection UR3 CB3 I 48 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 66: ...UR3 CB3 I 52 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 90: ...UR3 CB3 I 76 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 92: ...UR3 CB3 I 78 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 94: ...E 1 Table 1 UR3 CB3 I 80 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 95: ...E 1 Table 1 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved I 81 UR3 CB3...
Страница 97: ...E 2 Table 2 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved I 83 UR3 CB3...
Страница 98: ...E 2 Table 2 UR3 CB3 I 84 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 99: ...Part II PolyScope Manual...
Страница 100: ......
Страница 122: ...10 13 Safety I O CB3 II 24 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 134: ...12 2 Pose Editor Screen CB3 II 36 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 166: ...13 18 Run Tab CB3 II 68 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 225: ...Part III EUROMAP 67 Interface...
Страница 226: ......
Страница 230: ...16 2 Statutory notice CB3 III 6 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 246: ...18 4 I O action and wait CB3 III 22 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 250: ...19 2 Uninstalling CB3 III 26 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 254: ...20 4 Digital Outputs CB3 III 30 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...







































































