





























A1 PRO User Manual
Copyright © 2020 Unitree Robotics. All Rights Reserved
16
Charging
1.Connect the charger to an AC power source (100-240V, 50/60Hz). Before connecting, you must ensure
that the external power supply voltage matches the rated input voltage of the charger, otherwise the
charger will be damaged(the rated input voltage of the charger is indicated on the charger
nameplate).
2.Before charging the battery, the charger is connected to the AC power supply before the battery is
connected.
3.Before charging the battery, please make sure the battery pack is off, otherwise it will damage the
battery and charger.
4.Under the charging state, battery indicator will flash in a cycle and indicate the current battery level.
5.When the battery indicator is off, the battery pack is full. Please remove the battery pack and charger
to complete the charge.
6.After the robot is running, the battery pack temperature may be high. The battery pack must be
charged after the battery pack temperature drops to room temperature.
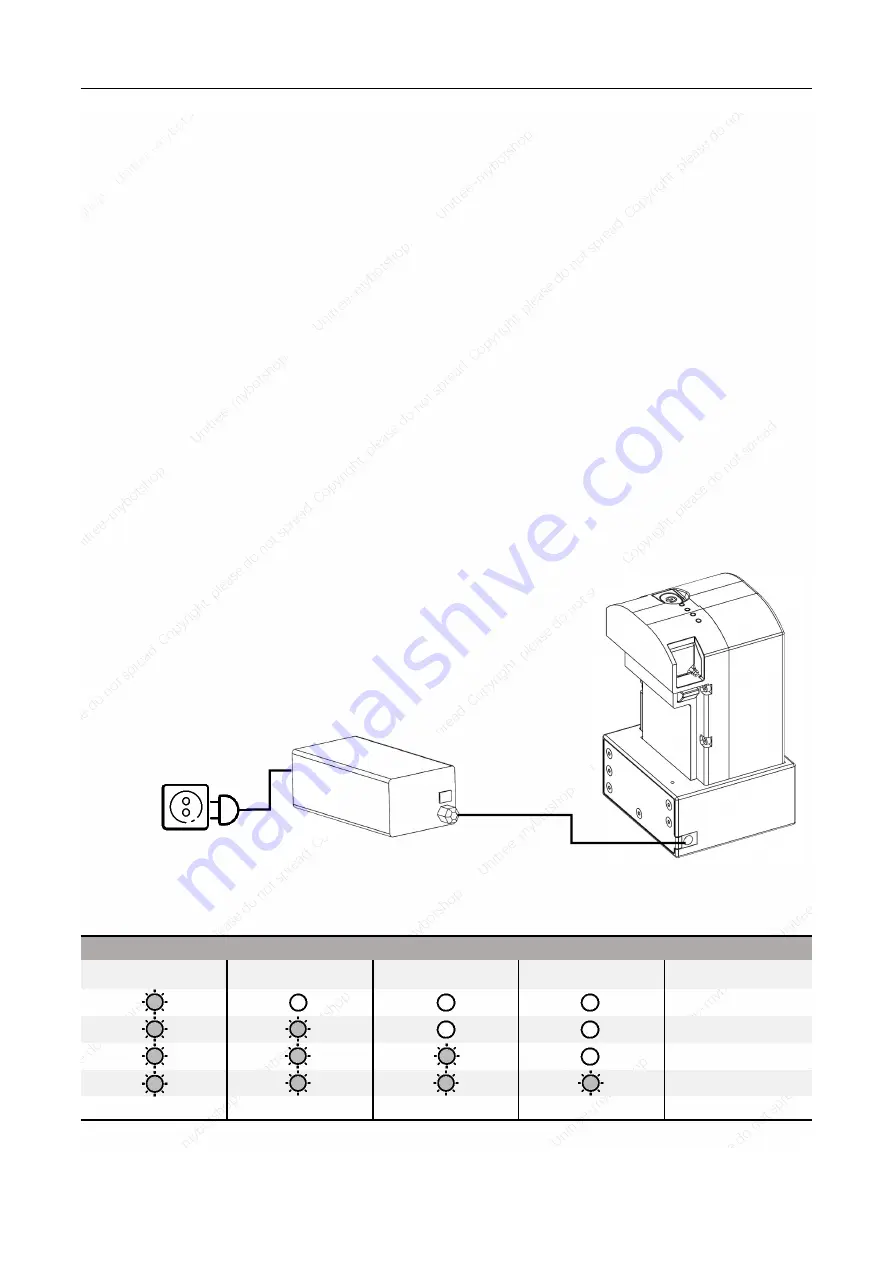
7.Schematic diagram of charging connection:
Charging Indicator
LED1
LED2
LED3
LED4
Current Battery
0%-25%
25%-50%
50%-75%
75%-100%
Full
Charging Protection Indication







































































