














A1 PRO User Manual
Copyright © 2020 Unitree Robotics. All Rights Reserved
49
Appendix
Specifications
Visit Unitree official website.
Chinese:http://www.unitree.cc/cn/
English:
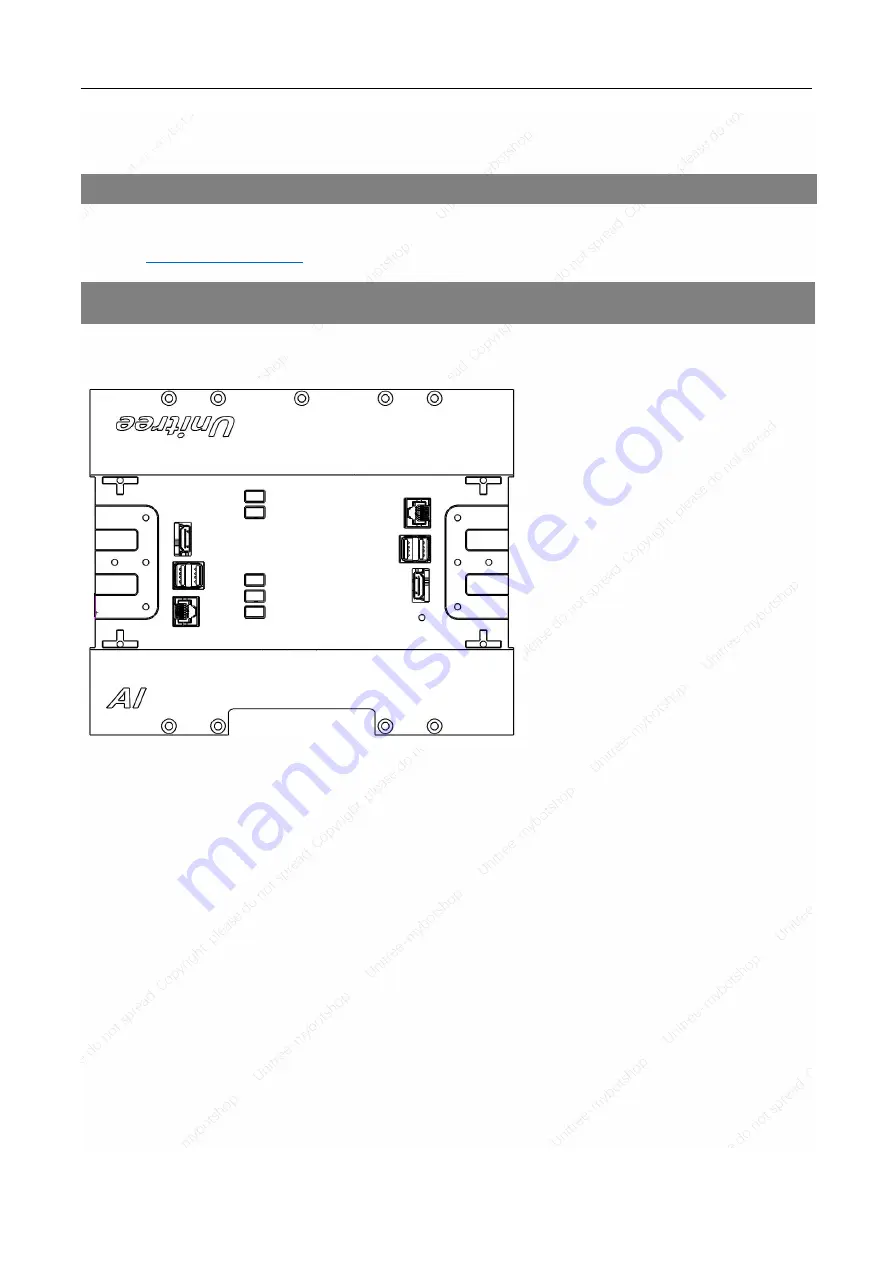
Interface diagram
⑬
⑪
⑫
1. TX2 HDMI
2. TX2 USB3.0
3. TX2 USB2.0
4. Ethernet Interface 1
5. Power Input 24V
6. Power Input 24V
7. Power Output (5V,2A)
8. Power Output (12V,2A)
9. Power Output (19V,2A)
10. Ethernet Interface 2
11. MiniPC USB2.0
12. MiniPC USB3.0
13. MiniPC HDMI
⑨
⑦
⑤
③
⑩
⑧
⑥
④
①
②







































































