





























TMCM-142 TMCL
TM
Firmware Manual (V1.06 / 2014-JUN-24)
24
Copyright © 2009, TRINAMIC Motion Control GmbH & Co. KG
6.7
Commands
The module specific commands are explained in more detail on the following pages. They are listed
according to their command number.
6.7.1
ROR (rotate right)
With this command the motor will be instructed to rotate with a specified velocity in
right
direction
(increasing the position counter).
Internal function:
First, velocity mode is selected. Then, the velocity value is transferred to axis parameter
#0 (
target velocity
).
The module is based on the TMC457 motor controller and the TMC239 power driver. This makes possible
choosing a velocity between 0 and 2147483647.
When axis parameter #255 (unit conversion mode) is set to 1 the speed must be given as microsteps per
second. In this case the range for the speed is 0…31999999 microsteps/second.
Related commands:
ROL, MST, SAP, GAP
Mnemonic:
ROR 0, <velocity>
Binary representation:
INSTRUCTION NO.
TYPE
MOT/BANK
VALUE
1
(don't care)
0
*
<velocity>
0… 2147483647
*motor number is always O as only one motor is involved
Reply in direct mode:
STATUS
VALUE
100 – OK
(don't care)
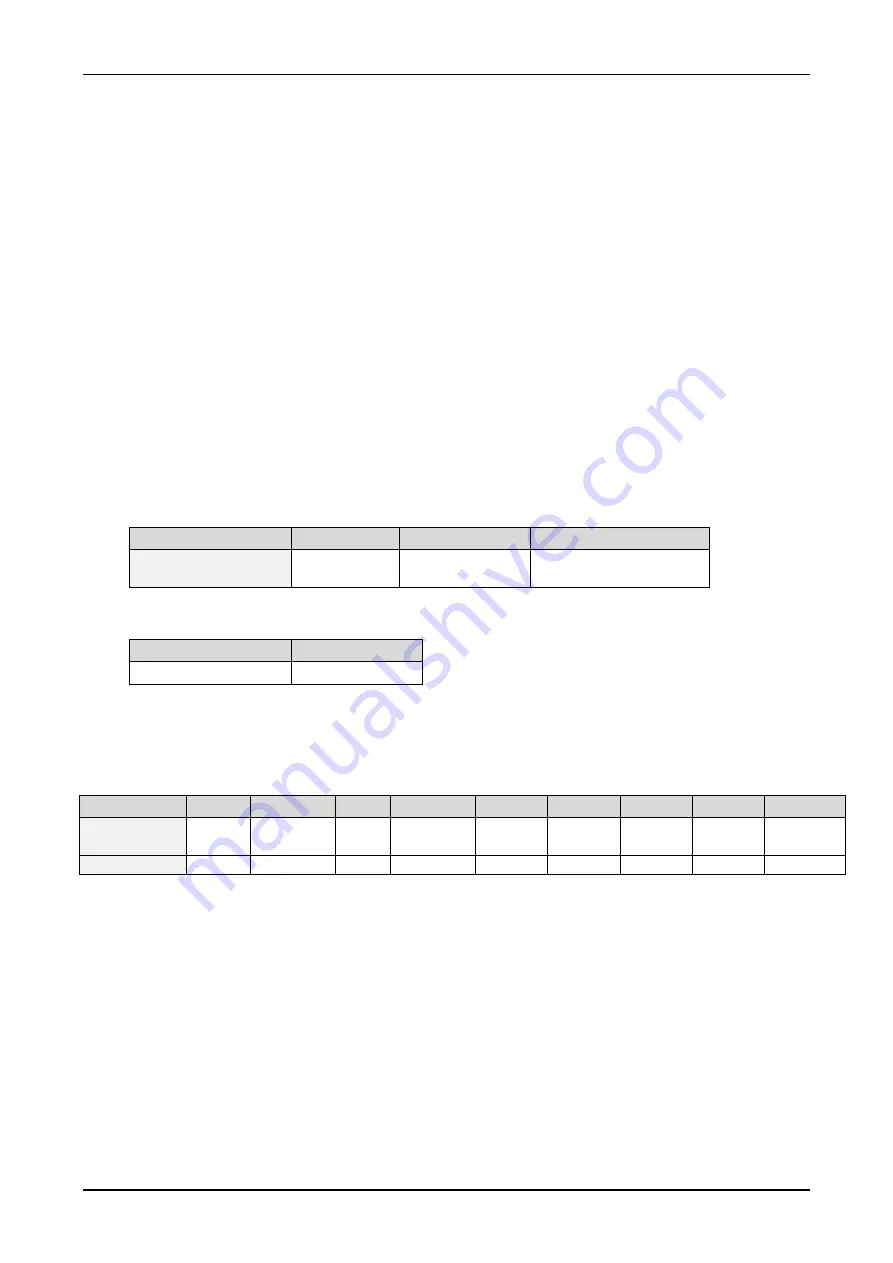
Example:
Rotate right, motor #0, velocity = 350
Mnemonic:
ROR 0, 350
Binary:
Byte Index
0
1
2
3
4
5
6
7
8
Function
Target-
address
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$01
$00
$02
$00
$00
$01
$5e
$62







































































