





























TMCM-142 TMCL
TM
Firmware Manual (V1.06 / 2014-JUN-24)
33
Copyright © 2009, TRINAMIC Motion Control GmbH & Co. KG
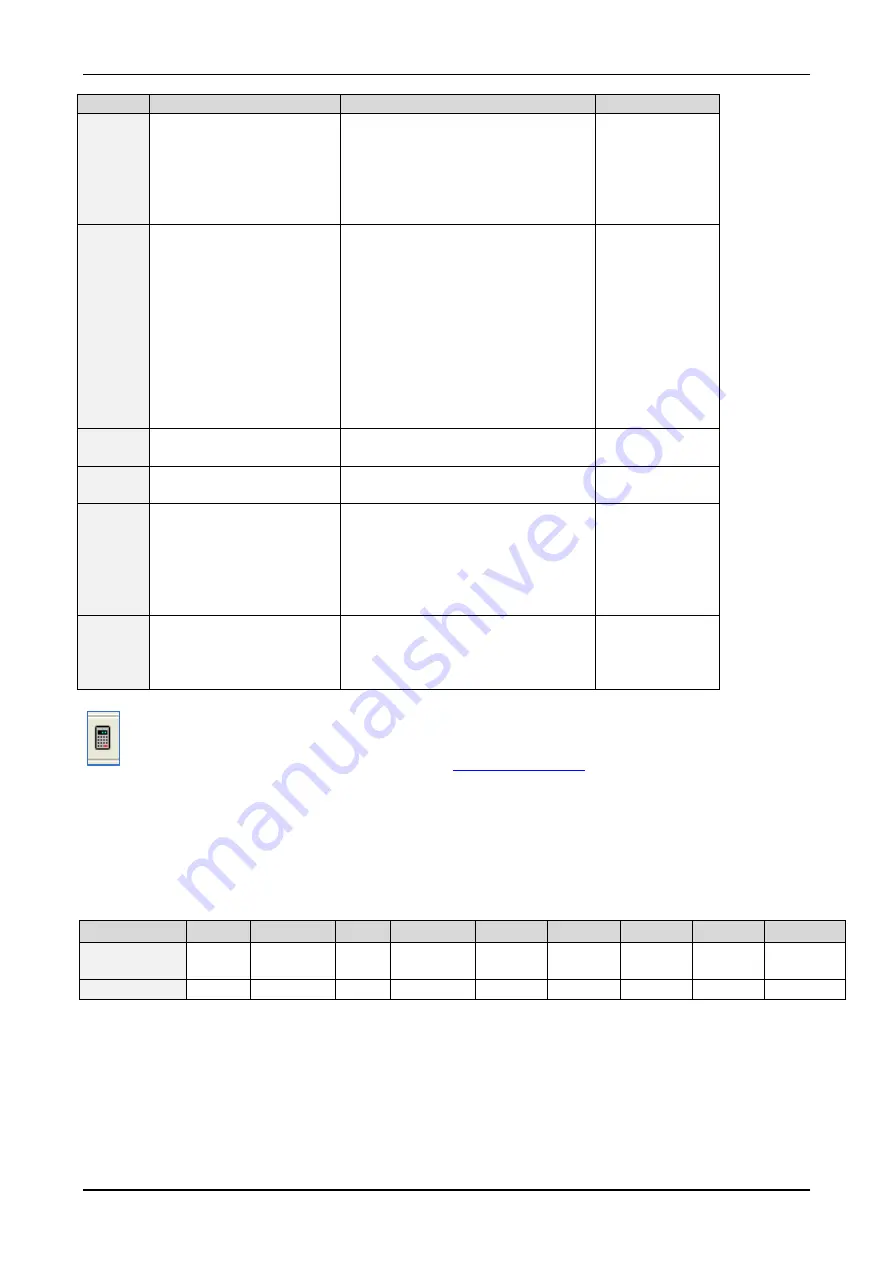
Number Axis parameter
Description
Range [Unit]
128
Ramp mode
Normally set automatically by the
ROL, ROR, MVP and MST commands.
0: positioning mode
1: reserved
2: velocity mode
3: hold mode
0...3
193
Reference search mode
1 – Only the left reference switch
is searched.
2 – The right switch is searched
and afterwards the left switch is
searched.
3 – Three-switch-mode: the right
switch is searched first and
afterwards the reference switch
will be searched.
Please see 9.2 for details on
reference search
1/2/3
194
Reference search speed
Specifies the reference search
speed.
0…2147483647
[µsteps/t]
195
Reference switch speed
Specifies the speed for the exact
reference switch calibration.
0…2147483647
212
Maximum encoder
deviation
When the actual position (param. 1)
and the encoder position (param.
41) differ more than the value set
here, the motor will be stopped.
Setting this parameter to 0 disables
this function.
0…2147483647
[µsteps]
255
Unit conversion mode
Units to use for velocity and
acceleration:
0: use TMC457 units
1: use PPS units
0/1
Please use the
TMC457 calculations data file (
) for getting best values.
Please refer to 7.1 for information about real world units vs. units of the TMC457.
Example:
Set the absolute maximum current of motor to 200mA
Mnemonic:
SAP 6, 0, 200
Binary:
Byte Index
0
1
2
3
4
5
6
7
8
Function
Target-
address
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$05
$06
$00
$00
$00
$00
$c8
$d5







































































