





























TMCM-142 TMCL
TM
Firmware Manual (V1.06 / 2014-JUN-24)
82
Copyright © 2009, TRINAMIC Motion Control GmbH & Co. KG
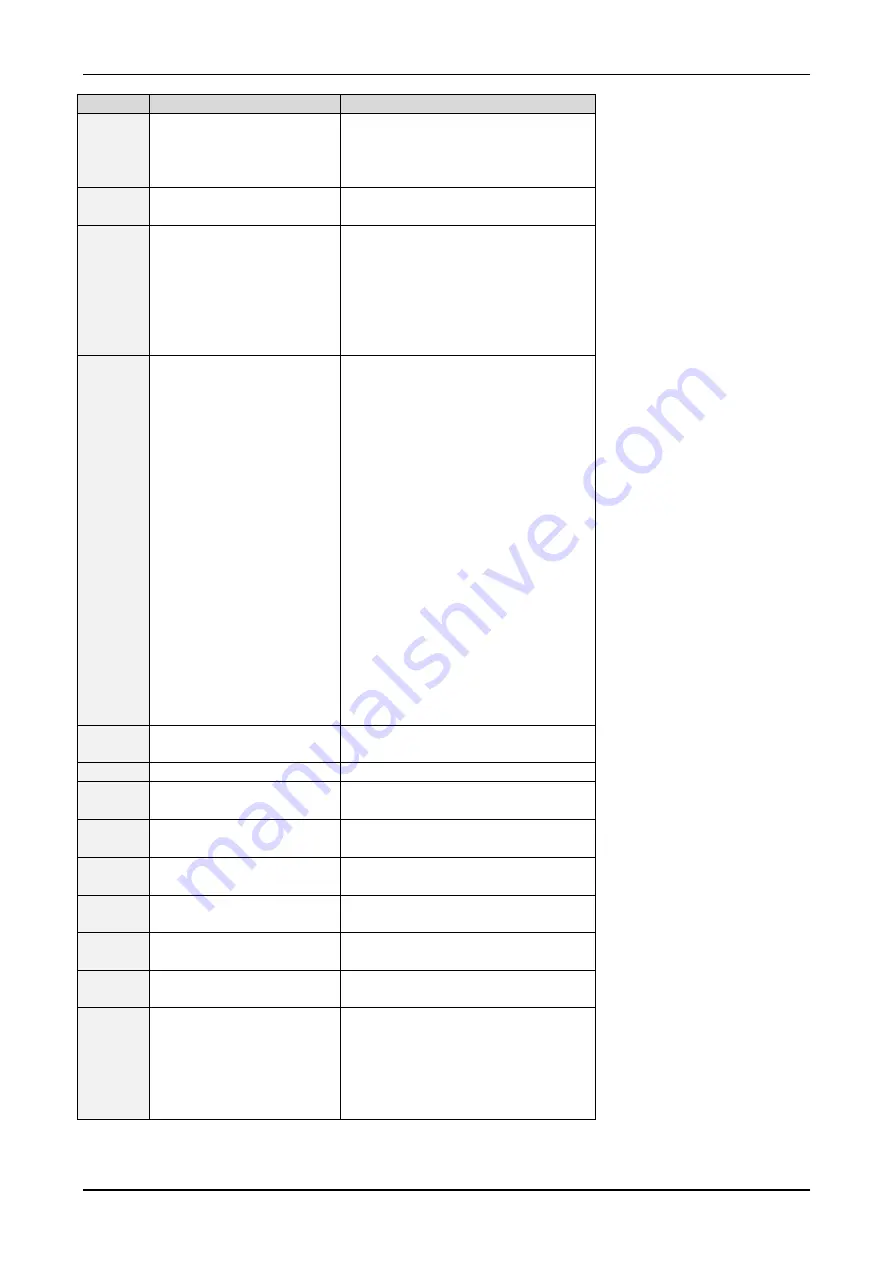
Number Axis parameter
Description
37
PID dv clipping
Clipping
parameter
for
PID
calculation result
pid_v_actual
pid_v_actual
=
v_actual
+
clip(PID_result,
pid_dv_clip
)
40
PID mode
0: do not use PID
1: use PID
42
Encoder constant
With every pulse this constant is
added to or subtracted from the
encoder position register. This
constant is given in units of
1/65536 when bit 13 in param. 43 is
not set or in 1/10000 when bit 13
in param. 43 is set.
43
Encoder mode
Bit 0: polarity of channel A when
null channel is active
Bit 1: polarity of channel B when
null channel is active
Bit 2: polarity of null channel
Bit 3: ignore polarity of A and B
channel when null channel is active
Bit 4: continuous clear while null
channel is active
Bit 5: clear once at next null
channel event.
Bit 6: null channel is positive edge
triggered
Bit 7: null channel is negative edge
triggered
Bit 8: clear encoder position on null
event (otherwise it is latched only)
Bit 13: Encoder divisor selection
(0=encoder
constant/65535,
1=encoder constant/10000).
47
Encoder warn distance
Maximum deviation between motor
and encoder.
48
Compare position
Tbd
50
Right position limit
Position limit when moving in
positive direction.
51
Left position limit
Position limit when moving in
negative direction.
52
Right
position
limit
enable
The motor cannot drive beyond the
right position limit when set to 1.
53
Left position limit enable
The motor cannot drive beyond the
left position limit when set to 1.
63
Microstep table position
Position of the microstep table
pointer.
64
Step pulse length
Length of the step pulses on the
step/direction output.
128
Ramp mode
Normally set automatically by the
ROL, ROR, MVP and MST commands.
0: positioning mode
1: reserved
2: velocity mode
3: hold mode






































































