





























TMCM-142 TMCL
TM
Firmware Manual (V1.06 / 2014-JUN-24)
39
Copyright © 2009, TRINAMIC Motion Control GmbH & Co. KG
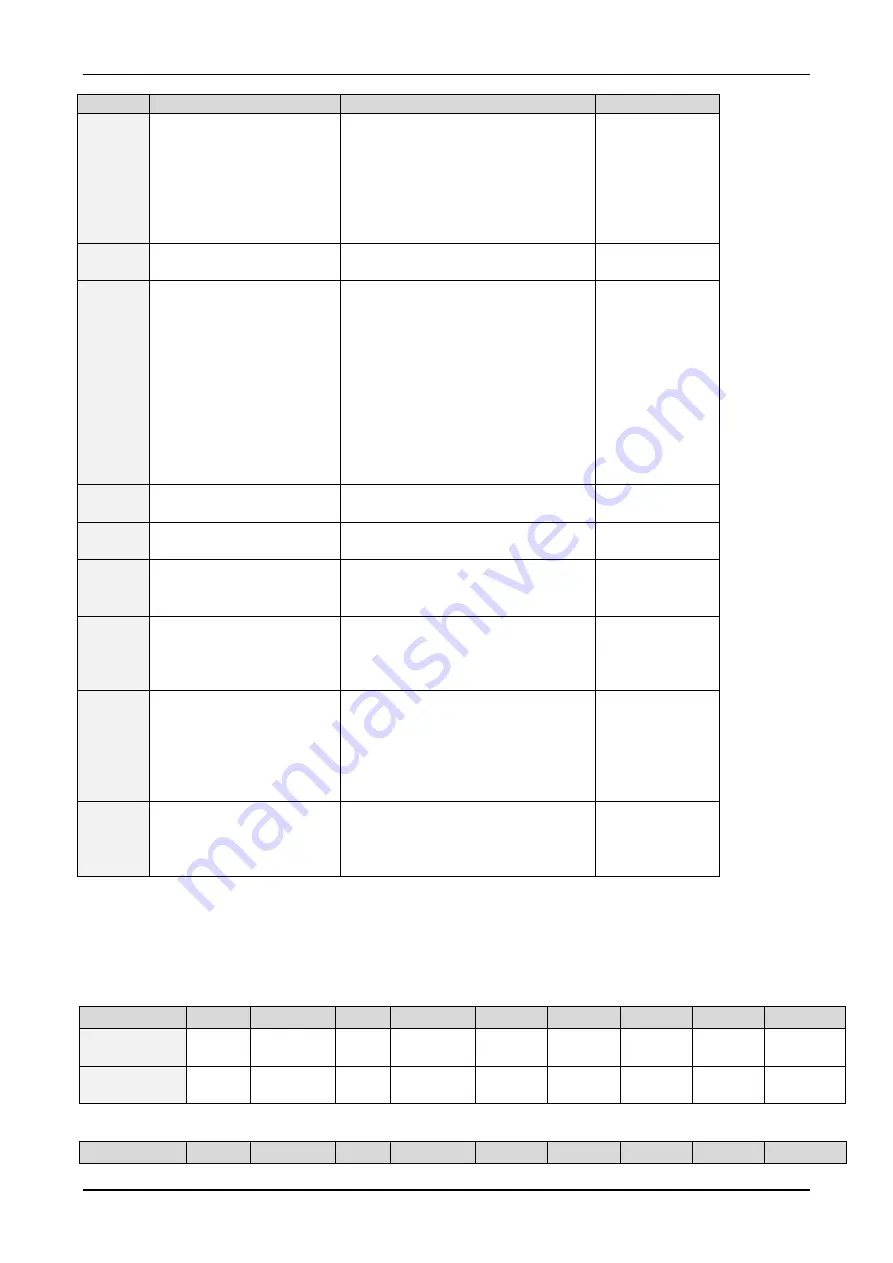
Number Axis parameter
Description
Range [Unit]
129
Status flags
Bit 0: target position reached (same
as parameter 8)
Bit 1: target velocity reached (same
as parameter 130)
Bit 2: motor not moving (v=0)
Bit 3: encoder warn distance
exceeded
130
Velocity reached
Reads 1 when the actual speed is
equal to the target speed
0/1
193
Reference search mode
1 – Only the left reference switch
is searched.
2 – The right switch is searched
and afterwards the left switch is
searched.
3 – Three-switch-mode: the right
switch is searched first and
afterwards the reference switch
will be searched.
Please see 9.2 for details on
reference search
1/2/3
194
Reference search speed
Specifies the reference search
speed.
0…2147483647
[µsteps/t]
195
Reference switch speed
Specifies the speed for the exact
reference switch calibration.
0…2147483647
196
End switch distance
Provides the distance between the
two end switches after executing a
reference search in mode 2 or 3.
0…2147483647
[µsteps]
207
Error flags
Bit 1: motor has been stopped due
to encoder deviation error
These two flags are cleared after
reading.
1/2/3
212
Maximum encoder
deviation
When the actual position (param. 1)
and the encoder position (param.
41) differ more than the value set
here, the motor will be stopped.
Setting this parameter to 0 disables
this function.
0…2147483647
[µsteps]
255
Unit conversion mode
Units to use for velocity and
acceleration:
0: use TMC457 units
1: use PPS units
0/1
Please refer to 7.1 for information about real world units vs. units of the TMC457.
Example:
Get the actual position of motor
Mnemonic:
GAP 0, 1
Binary:
Byte Index
0
1
2
3
4
5
6
7
8
Function
Target-
address
Instruction
Number
Type
Motor/
Bank
Operand
Byte3
Operand
Byte2
Operand
Byte1
Operand
Byte0
Checksum
Value (hex)
$01
$06
$01
$00
$00
$00
$00
$00
$0a
Reply:
Byte Index
0
1
2
3
4
5
6
7
8







































































