























3.7
RISCHI RESIDUI
L'analisi dei requisiti essenziali di sicurezza e di tutela della salute, eseguita da TOPP SpA in base alla Direttiva Macchine
2006/42/CE ha fatto riferimento ad un sito installativo "tipo" e ad un utenza adeguata al tipo di macchina che verrà
realizzata. Si ritiene pertanto necessario riportare alcuni rischi residui non protetti:
1) Rischio legato alla solidità, allo stato di usura e alla qualità d'installazione del sito da motorizzare.
2) Rischio legato alla perdita di stabilità dovuta a fissaggi non corretti a causa di negligenze da parte di chi installa
l'automazione.
3) Rischio dovuto ad eventuali bordi spigolosi o taglienti preesistenti nel sito da motorizzare non adeguatamente protetti
da chi installa l'automazione
4) Rischio di convogliamento, uncinamento e taglio dovuto alla presenza di maniglie, vetri incassati, parti sporgenti e parti
affilate, presenti nel sito da motorizzare e non adeguatamente protetti da chi installa l'automazione
5) Rischio di impatto e schiacciamento se chi installa l'automazione non segue scrupolosamente la regolazione "peso
porta"
6) Rischio d'impatto e schiacciamento se l'automazione viene installata in ambienti dove è frequente l'uso da parte di
anziani, bambini, disabili o comunque persone fragili in genere, e non vengono presi adeguati accorgimenti relativi alla
sicurezza in uso.
Qualsiasi procedura, tipologia d'installazione e regolazione non prevista o considerata dal presente manuale, è
da considerarsi non coperta dall'analisi dei requisiti essenziali di sicurezza e tutela della salute condotta da
TOPP SpA e pertanto rimarrà a cura di un installatore professionale andare a rieseguire l'analisi completa sotto
la sua responsabilità.
IT
USO E FUNZIONAMENTO
4
4.1
DESCRIZIONE TECNICA
L’automazione è di tipo magnetico con assenza di frizioni o freni, così da evitare possibili bloccaggi di carattere continuo a
causa di danni o rotture della struttura.
L’alimentazione è di 230V~ 50 Hz .
Il binario di scorrimento dell’automazione è costituito da magneti permanenti.
La scheda elettronica di comando e controllo è di tipo a microprocessore con tasti a bordo per la regolazione dei
parametri, quali, velocità di apertura e chiusura, spazio rallentamenti, bassa velocità di accostamento, tempo richiusura
automatica e modalità di funzionamento.
L’automazione è dotata di varie funzionalità,tra le quali:
-funzione Pull & go,che consente il movimento automatico della porta se viene leggermente spinta o tirata;
- funzionamento notturno ultraslow (selezionabile tramite telecomando),che riduce la rumorosità;
- la possibilità di essere collegato su porte a doppia anta grazie protocollo di comunicazione;
-la possibilità di essere collegato alla rete domotica tramite Bus (fino a 63 attuatori utilizzabili in un’unica rete);
-la possibilità di aggiornare il software tramite ingresso seriale su scheda di programmazione.
Nel caso in cui vi sia mancanza di tensione,esiste una funzione di ripristino automatico della porta.
L’automazione M1 è stata progettata in modo tale che la porta, in buone condizioni possa essere movimentata con una
forza non superiore ai 220 N per evitare il rischio di intrappolamento.
10
ISTRUZIONI PER L’INSTALLAZIONE E L’USO
IT
M1
-
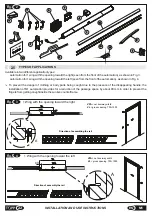
Figura 21:
Far passare il cavo del sensore nello spazio superiore tra il tappo laterale per il fissaggio alla staffa e lo stipite
superiore della porta. Accompagnare il cavo, all'interno del vano, solitamente presente sopra la battuta della porta, come
descritto in Figura 21 e farlo fuoriuscire dalla parte opposta per la lunghezza sufficiente a raggiungere la posizione del
sensore. Verificare che lo spessore del cavo non vada ad influire con la corretta chiusura della porta. Eventualmente
ricavare dello spazio, per il passaggio del cavo, rimuovendo col taglierino la parte superiore delle guarnizioni di battuta.
Assicurarsi che il cavo non si sposti dalla posizione stabilita eventualmente utilizzando adeguate soluzioni di fissaggio
(es. nastro adesivo o apposite graffette per cavo tondo). Collegare l'estremità del cavo all'apposito morsetto E di Figura
26 seguendo le indicazioni di Figura 23.
Nel caso si installi il sensore Infrarosso TOPP IS4 il cavetto azzurro deve
essere collegato al morsetto 5V.
-
Figura 22:
In alternativa al passaggio del cavo descritto in Figura 21,forare con trapano idoneo la parete assicurandosi
di non far depositare polvere o detriti sull'attuatore o sul binario, tramite punta diametro 5 mm collegare un estremo del
cavo del sensore al connettore E di fig. 26 seguendo le indicazioni di fig. 23.
Nel caso si installi il sensore Infrarosso
TOPP IS4 il cavetto azzurro deve essere collegato al morsetto 5V.
Inserire il cavo del sensore nel foro appena
eseguito facendolo fuoriuscire dalla parte opposta per almeno 70 cm
-
Figura 24:
A questo punto forare con trapano idoneo nella mezzeria della porta; a fori eseguiti inserire i due tasselli per
fissaggi leggeri 4x20 ( forniti in dotazione ).Far scorrere il cavo del sensore sopra la cornice della porta, inserirlo
nell’apposito foro della base di fissaggio del sensore facendolo fuoriuscire per almeno 70 mm (vedi figura).
Fissare definitivamente la base di fissaggio tramite due viti AF TSP d3x25.
-
Figura 25:
collegare all’altra estermità del cavo il connettore della scheda elettronica del sensore prestando attenzione
al posizionamento dei fili . Applicare sulla base di fissaggio l’assieme scheda elettronica e sensore, quindi applicare la
cover anteriore. Applicare il coperchio pressacavo sul motore magnetico( componente 12 fig.2 ),prestando attenzione
che i cavi non si sormontino tra di loro.
Содержание M1
Страница 2: ...2 ISTRUZIONI PER L INSTALLAZIONE E L USO IT M1 ...
Страница 34: ... 34 FIGURE M1 Fig 11 5 0 Fig 10 ...
Страница 36: ...Fig 15 Fig 17 1 2 34 5 Fig 16 Fig 18 36 FIGURE M1 Coppia di serraggio 1 7Nm Force equal to 1 7Nm A ...
Страница 37: ...Fig 19 75 10 Fig 20 37 M1 FIGURE ...
Страница 38: ... M1 FIGURE 38 Fig 21 Fig 22 ...
Страница 40: ... M1 FIGURE 40 Fig 70mm 24 Fig 25 TOPP M1 TOPP M1 ...
Страница 42: ... M1 FIGURE 42 Fig 27 ...







































































