


























Technosoft 2021
27
iPOS360x HX-CAN Technical Reference
3.5.8.5
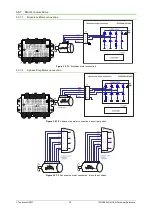
Linear Hall Connection ( only with P028.00x.E571)
Figure 3.5.8.5
Linear Hall connection
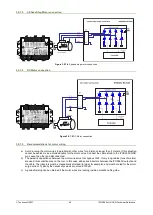
3.5.8.6
Sin-Cosine Analog Encoder Connection ( only with P028.00x.E501)
Figure 3.5.8.6
Sine-Cosine analog encoder connection
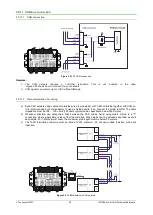
3.5.8.7
Recommendations for wiring
a) Always connect both positive and negative signals when the position sensor is differential and provides them.
Use one twisted pair for each differential group of signals as follows: A+/Sin+ with A-/Sin-, B+/Cos+ with B-
/Cos-, Z+ with Z-. Use another twisted pair for the 5V supply and GND.
b) Always use shielded cables to avoid capacitive-coupled noise when using single-ended encoders or Hall
sensors with cable lengths over 1 meter. Connect the cable shield to the GND, at only one end. This point
could be either the iPOS360x (using the GND pin) or the encoder / motor. Do not connect the shield at both
ends.
c) If the iPOS360x 5V supply output is used by another device (like for example an encoder) and the connection
cable is longer than 5 meters, add a decoupling capacitor near the supplied device, between the +5V and GND
lines. The capacitor value can be 1...10 μF, rated at 6.3V
3.5.9 Power Supply Connection







































































