




















Technosoft 2021
33
iPOS360x HX-CAN Technical Reference
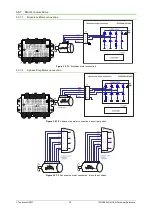
3.5.12 Disable of Autorun Mode
Figure 3.5.12.1
Temporary
c
onnection during power-on to disable the drive from Autorun mode
When the iPOS360x is configured for TMLCAN communication protocol, the default operation mode is
Autorun
. If a
TML program is present in the EEPROM of the drive, the iPOS360x will start its execution.
In case the TML program becomes corrupted, i.e. due to strong electromagnetic fields, the
Autorun
mode can be
disabled by:
a) Software: writing the value
1
in the first EEPROM location (address 0x4000). You can use the
Command
Interpreter
from EasySetUp / EasyMotion Studio to execute the following instructions:
var_i1 = 0x4000; (var_i1), spi = 1;
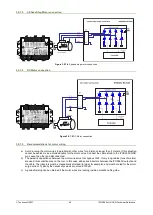
b) Hardware:
a. connecting all digital Hall inputs to GND, as shown in
Figure 3.23
. This option is particularly useful
when you are unable to establish communication with the drive.
b. temporarily connect JP1 in position 1-2 to switch to CANopen protocol. After a drive restart, the drive
will not auto-run any program while in CANopen. Reconfigure the settings as needed and switch back
to TMLCAN.
After the drive is set in
slave / non-Autorun
mode using the second method, the first one may be used to disable the
TML application from the EEPROM. On next power on the drive will enter in the
slave / non-Autorun
mode independently
of the digital Hall inputs status
3.6 CAN Operation Mode and Axis ID Selection
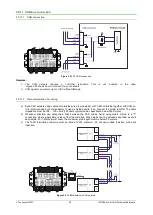
3.6.1
Selection of the Operation Mode
On iPOS360x HX-CAN, the selection of the operation mode CANopen or TMLCAN is done by setting the JP1
position:
•
CANopen mode, JP1 = position 1-2
•
TMLCAN mode, JP1 = position 2-3 or OFF
Figure 3.6.1.1
JP1 Location







































































