



























Technosoft 2021
18
iPOS360x HX-CAN Technical Reference
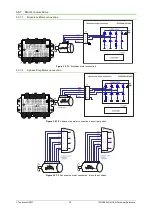
3.5.2 iPOS360X HX-CAN connection diagram (single-ended encoder version; P028.00x.E561)
Figure 3.5.2
iPOS360X HX-CAN Connection diagram with a single-ended encoder
* For other available feedback / motor options, check the detailed connection diagrams below







































































