


























55
ls -a
cd
.picar-4wd/
nano
config
2) In the configure file, the first 4 lines of codes are used to control the turning of the motor. The last line is
used to adjust the angle of the servo. For example, if in the above test, the direction of the motor at
bottom left is reverse, so we change the code in the third line to left_rear_reverse =
True
.
Содержание PiCar-4WD
Страница 6: ...1 Component List Structural Plates ...
Страница 7: ...2 Mechanical Parts ...
Страница 8: ...3 Electronic Parts ...
Страница 9: ...4 Other Parts ...
Страница 10: ...5 ...
Страница 20: ...15 Step 9 Set country region language and time zone and then click next again ...
Страница 21: ...16 Step 10 Input the new password of Raspberry Pi and click Next ...
Страница 22: ...17 Step 11 Connect the Raspberry Pi to WIFI and click Next ...
Страница 23: ...18 Step 12 Retrieve update ...
Страница 47: ...42 Assembling Nylon Standoffs M2 5 6 Screw M2 5 8 6mm Nylon Standoff ...
Страница 48: ...43 Assembling Top Plate and Bottom Plate M3 8 Screw M3 30mm Nylon Standoff M3 8 Screw ...
Страница 49: ...44 Assembling Spoiler Spoiler ...
Страница 50: ...45 Assembling Control Board 4WD Hat M2 5 11mm Nylon Standoff M2 5 6 Screw Raspberry Pi ...
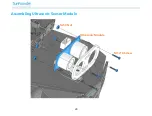
Страница 53: ...48 Assembling Ultrasonic Sensor Module M1 4 8 Screw M1 4 Nut Ultrasonic Module ...
Страница 54: ...49 Assembling Wheels finished ...
Страница 56: ...51 Interface Introduction ...
Страница 63: ...58 ...
Страница 67: ...62 Python Example Code Analysis Program Structure Framework ...

































































