




















Содержание PiCar-4WD
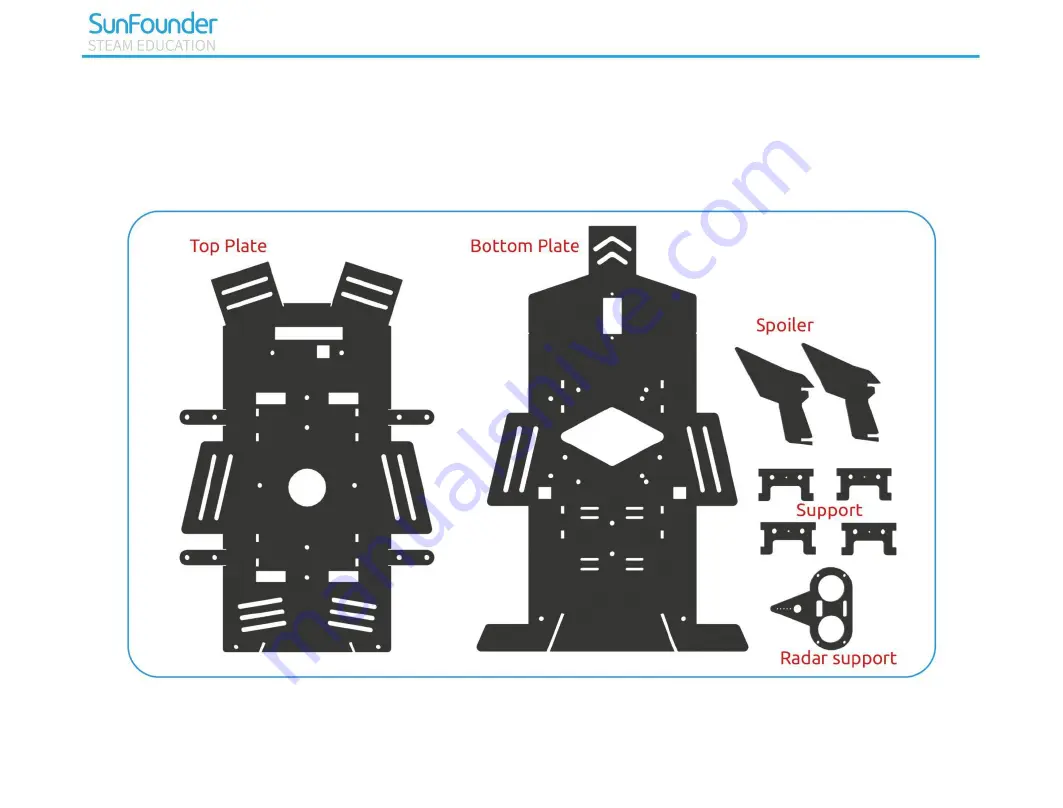
Страница 6: ...1 Component List Structural Plates ...
Страница 7: ...2 Mechanical Parts ...
Страница 8: ...3 Electronic Parts ...
Страница 9: ...4 Other Parts ...
Страница 10: ...5 ...
Страница 20: ...15 Step 9 Set country region language and time zone and then click next again ...
Страница 21: ...16 Step 10 Input the new password of Raspberry Pi and click Next ...
Страница 22: ...17 Step 11 Connect the Raspberry Pi to WIFI and click Next ...
Страница 23: ...18 Step 12 Retrieve update ...
Страница 47: ...42 Assembling Nylon Standoffs M2 5 6 Screw M2 5 8 6mm Nylon Standoff ...
Страница 48: ...43 Assembling Top Plate and Bottom Plate M3 8 Screw M3 30mm Nylon Standoff M3 8 Screw ...
Страница 49: ...44 Assembling Spoiler Spoiler ...
Страница 50: ...45 Assembling Control Board 4WD Hat M2 5 11mm Nylon Standoff M2 5 6 Screw Raspberry Pi ...
Страница 53: ...48 Assembling Ultrasonic Sensor Module M1 4 8 Screw M1 4 Nut Ultrasonic Module ...
Страница 54: ...49 Assembling Wheels finished ...
Страница 56: ...51 Interface Introduction ...
Страница 63: ...58 ...
Страница 67: ...62 Python Example Code Analysis Program Structure Framework ...







































































