





























Motor control operations
UM0432
38/53
7.5
Driving the BLDC motor (trapezoidal - sensorless)
This section describes how to drive the sensorless brushless permanent magnet motor. You
should
first
check that the board has been set-up for sensorless driving (see
Section 7.4.4
).
7.5.1 Specific
connection (sensor)
To also drive the motor in closed-loop mode, it is not necessary that the motor include any
position or speed sensor. For this demonstration we suggest using one Ametek BLDC
blower motor (voltage max 30 Vdc).
7.5.2
Specific jumper settings
Set-up the board following the instructions in
Section 7.4.12
(bus voltage between 9 and 28
V) and
Section 7.4.13
.
Set-up the board as per
Table 14
.
7.5.3
LED action after power-on
Turn on the power supply. For this demonstration the power supply output voltage should be
set to 20 Vdc and the current limitation of the power supply should be set to 4 A.
After power-on, the control board LEDs should blink red, signaling that the firmware has
started to run. After a while a green LED stays on indicating an "idle" state.
7.5.4 Setting
the
potentiometers
Before running the motor, the three potentiometers P1, P2, P3 must be set (see
Table 15
for
the correct configuration).
7.5.5 Running
the
motor (LED action)
Push the Start/Stop button. After pushing the button, the LEDs toggle from green to red to
indicate a "run" state. The motor starts to run.
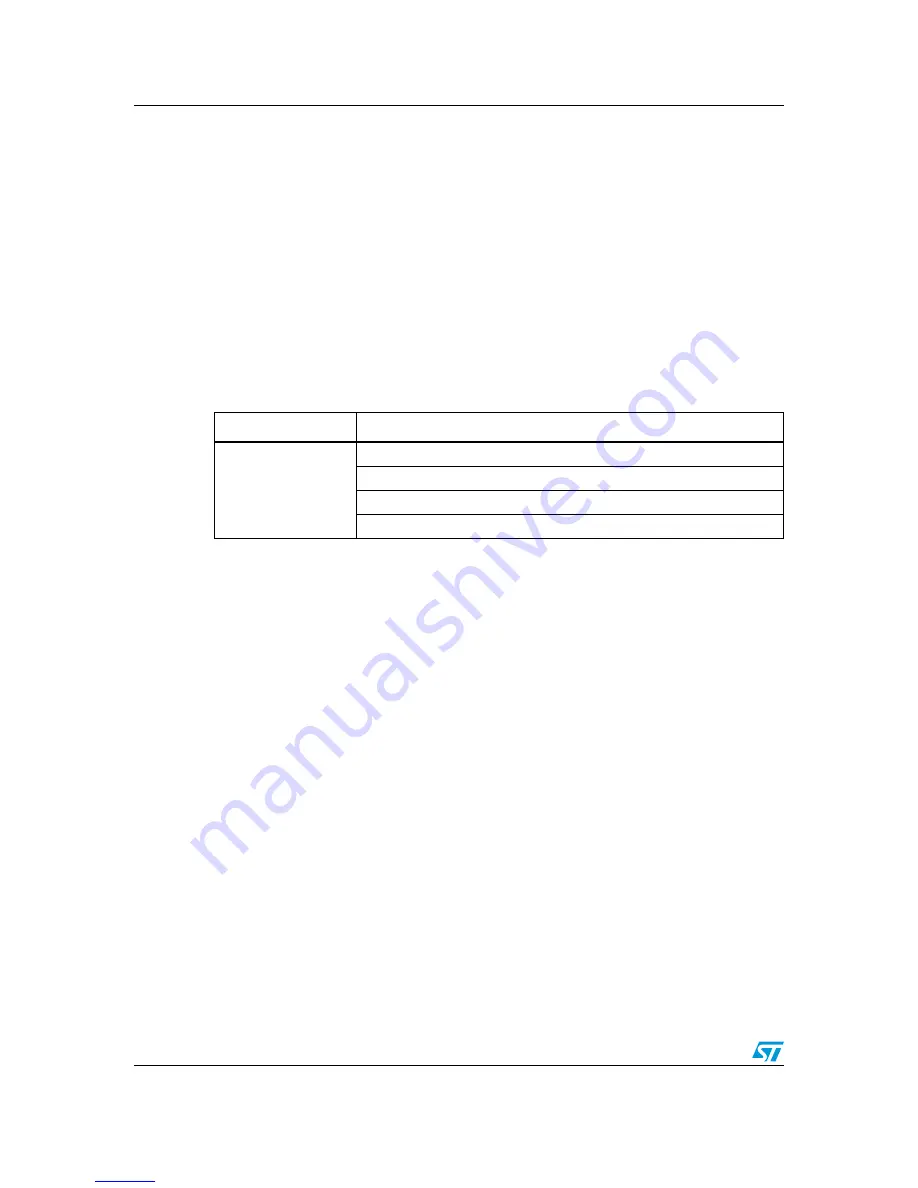
Table 14.
BLDC SL jumpers setting
Driving mode
Jumper setting
BLDC_3PH_SL
J11 between 2-3, J12 between 2-3, J13 between 1-2
J15 between 2-3, J16 between 2-3, J17 between 1-2
J18 between 2-3, J19 between 2-3, J20 between 1-2
J3 Closed, J4 variable (2-3)
electronic components distributor