





























-41-
No. JXC
※
-OMY0008
10.2 Basic parameters
The "Basic parameter" is the data to define the operating conditions of the controller, conditions of the
actuator, etc.
Details of basic parameters
Activation: "■" = Effective as soon as it is recorded into the controller
"○" = Become effective after restarting the controller
"-" = The parameter cannot be changed (fixed value)
Description
Range
Explanation
Write
Controller
setting
software
Teaching
box
Controller ID Controller ID 1 to 32
Identification number (axis) parameter of serial
communication that this controller communicates with the PC
or the teaching box is set.
○
IO pattern
IO pattern
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
The value for this should be 64 (Standard).
-
Acceleration/
deceleration
pattern
Acceleration/
deceleration
pattern
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
This defines the trapezoidal acceleration/deceleration parameter.
-
S-motion
rate
S-motion
rate
Fixed value
This is the fixed value for this controller.
(
∗
Do not change the setting)
-
Stroke (+)
Stroke (+)
(
∗
1)
This defines the positive (+) side limit of the position. (Unit: mm)
Any value greater than the [)] value cannot be entered in
the "Position" field data of step parameter setup.
■
Stroke (-)
Stroke (-)
(
∗
1)
This defines the positive (+) side limit of the position. (Unit: mm)
Any value less than the [stroke(-)] value cannot be entered in the
"Position" field data of step parameter setup.
■
Maximum
velocity
Maximum
velocity
(
∗
1)
This defines the maximum limit of the speed. (Unit: mm/s)
Any value greater than the [Max speed] value cannot be entered
in the "Speed" field data of step parameter setup.
■
Maximum
Acceleration/
Deceleration
speed
Maximum
Acceleration/
Deceleration
speed
(
∗
1)
This defines the maximum limit of the ACC/DEC. (Unit: mm/s
2
)
Any value greater than the [Max ACC/DEC] value cannot be
entered in the "Accel" field data of step parameter setup.
■
Default In
position
Default In
positioning
(
∗
1)
This defines the range to activate the INP output when the
actuator is within it after the return to origin operation. (Unit: mm)
■
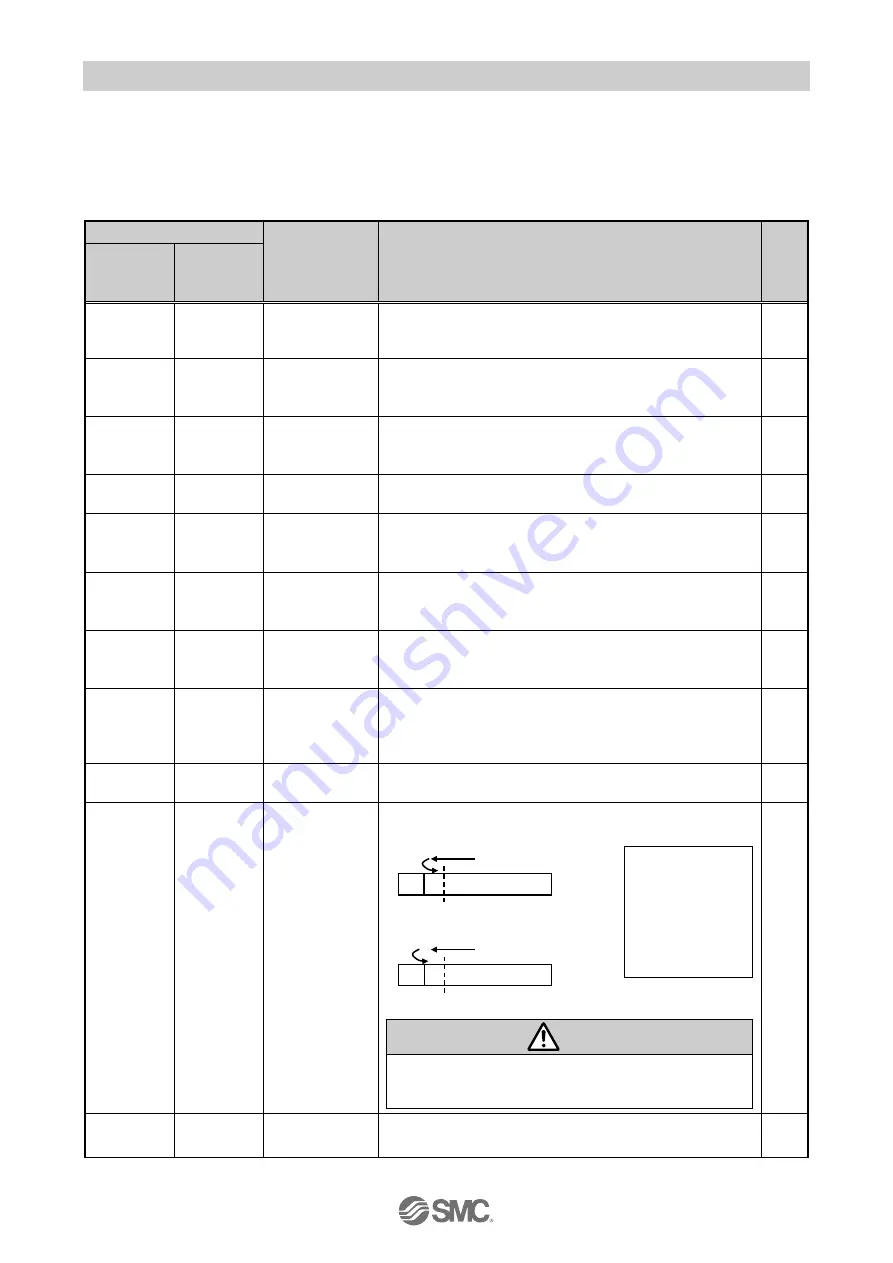
ORIG offset
ORIG offset
(
1)
This defines the position of the actuator after the return to origin
operation. (Unit: mm)
■The ORIG offset is 0 (mm).
■The ORIG offset is 100 (mm).
Caution
If the value for the "ORIG offset" is changed, the "Stroke
(+)" and "Stroke (-)" of the basic parameters should be
checked.
■
Maximum
pushing force
Maximum
pushing force
(
∗
1)
The maximum force for the pushing operation. (Unit %)
■
M
In the examples on the
left, the actuator positions
are not different but the
reference point that the
controller recognizes will
be changed after the
return to origin operation.
The position is identified by the controller after
the return to the origin operation (0mm).
Actuator
M
Actuator
The position is identified by the controller after
the return to the origin operation (100mm).
Содержание JXCEH
Страница 17: ...16 No JXC OMY0008 2 DIN rail mounting JXCEH8...







































































