















SMAC
LAC-26 Technical Reference Manual
4/29/2013 84
B.1.5 Motor Problems
A motor run-away condition is when the motor spins rapidly with no control from the command input. The
most likely cause of this error comes from having the feedback element connected for positive feedback.
This can be solved by changing the order that the feedback element lines are connected to the drive, or by
using DriveWare to reverse the internal velocity feedback polarity setting.
Another common motor issue is when the motor spins faster in one direction than in the other. This is
typically caused by improper motor commutation or poor loop tuning. Follow the steps in the DriveWare
Software Guide to properly commutate and tune the motor.
B.1.6 Causes of Erratic Operation
•
Improper grounding (i.e., drive signal ground is not connected to source signal ground).
•
Noisy command signal. Check for system ground loops.
•
Mechanical backlash, dead-band, slippage, etc.
•
Noisy inhibit input line.
•
Excessive voltage spikes on bus
B.1.7 Phase detect problems on startup
Under some circumstances the phase detect fault signal can be set at power up which will show a phase
detect error. If this condition occurs there is an index that controls which events can be reset using the reset
events function via digital input (normally the phase detect fault can not be reset). Below is the procedure for
setting the index bit to allow the phase detect fault to be reset after power on:
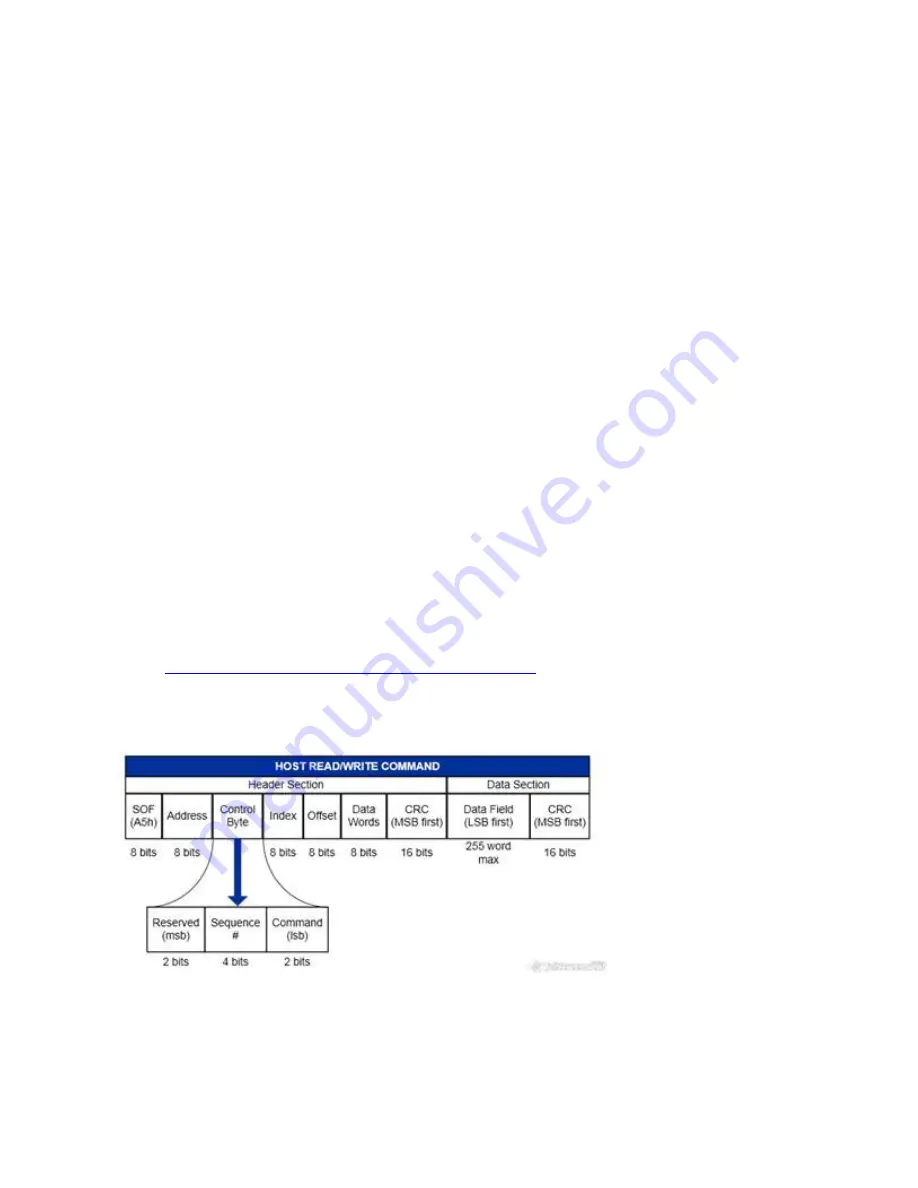
An rs232 program is required to write the hex information directly to the amplifier. Here is an example
program:
http://www.compuphase.com/software_termite.htm
The index that controls the reset events function is index 105, offset 2. Bit 5 should be set to 1 to enable phase
detection fault a re-settable event. The command would look like this:







































































