





























SMAC
LAC-25 Technical Reference Manual
35
22
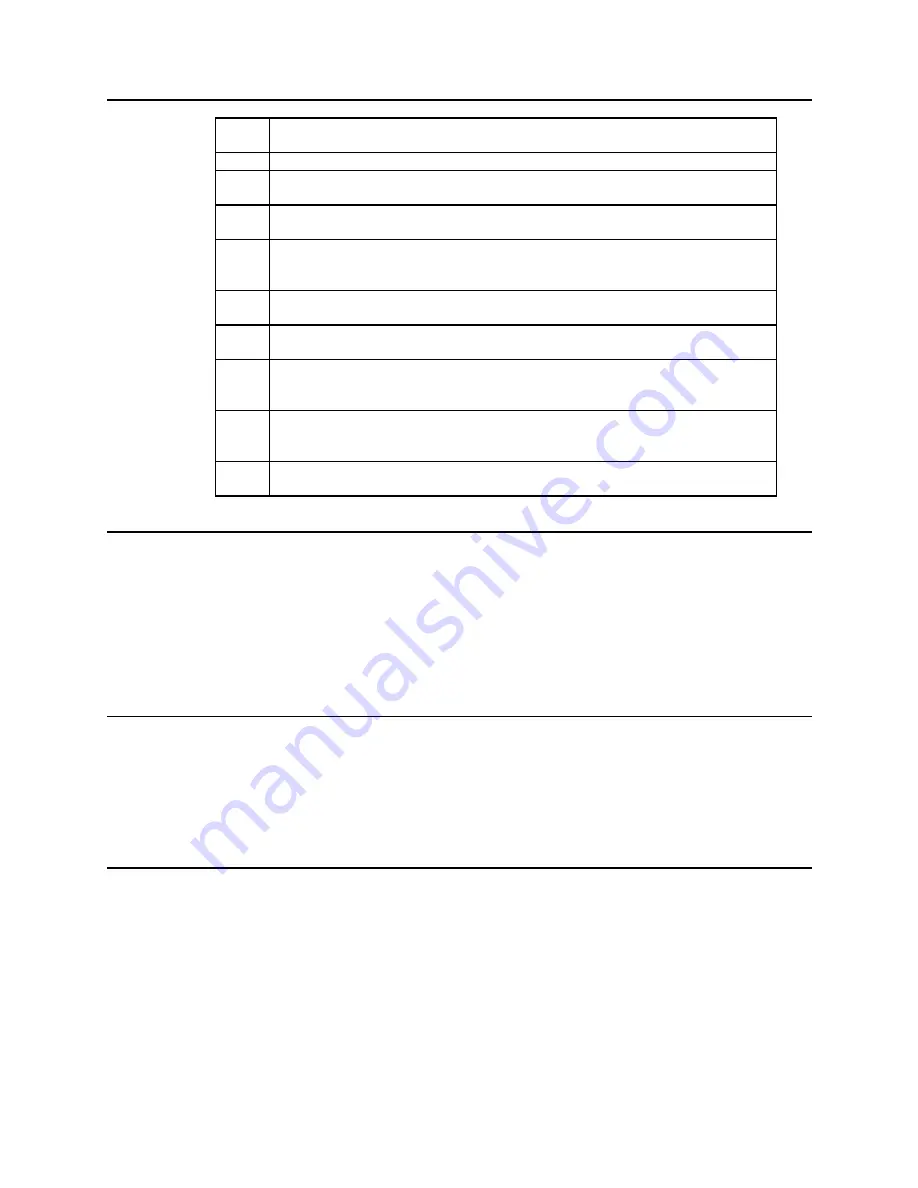
Electronic Gearing Mode.
A Ò1Ó in this bit position indicates that the
servo is currently operating in electronic gearing mode.
23
Reserved.
24
Limit Mode Abort.
Used by Limit Mode (LM) to determine what action
to take upon the occurrence of a limit switch event.
25
Limit Mode Stop.
Used by Limit Mode (LM) to determine what action
to take upon the occurrence of a limit switch event.
26
Limit- Tripped.
A Ò1Ó in this bit position indicates that a Limit- input
event has occurred and has been acted upon as set by the Limit
Mode (LM) command.
27
Limit- Enabled.
A Ò1Ó in this bit position indicates that the Limit- input
has been enabled for action via the Limit Mode (LM) command.
28
Limit- Active.
A Ò1Ó in this bit position indicates that the Limit- input is
currently active.
29
Limit+ Tripped.
A Ò1Ó in this bit position indicates that a Limit+ input
event has occurred and has been acted upon as set by the Limit
Mode (LM) command.
30
Limit+ Enabled.
A Ò1Ó in this bit position indicates that the Limit+
input has been enabled for action via the Limit Mode (LM)
command.
31
Limit+ Active.
A Ò1Ó in this bit position indicates that the Limit+ input
is currently active.
Command:
aTT
-- Tell Target Position --
This command reports the current target position of servo axis 'a'. This is the absolute
position to which the servo was last commanded to move. It may have been specified directly with
the Move to Position (MP) or Move Absolute (MA) commands or indirectly with the Move Relative
(MR) command. If the servo axis is in Velocity Mode (VM), then the target position will track the
current optimal position (or that which is reported by the Tell Optimal (TO) command).
Related Commands: TO, TP
Command:
aTV
-- Tell Current Velocity --
This command reports the trajectory generator current velocity for servo axis 'a'. The value
reported has the same units as the Set Velocity (SV) command. See the description of that
command for further details.
Related Commands: SV, SS





















































