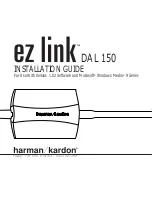
Figure 4: TMM88B measuring axis (aluminum housing)
4.3
Technical data for TMS88D/TMM88D
Table 4: General parameters for the dynamic inclination sensor
General parameters for the dynamic
inclination sensor
1
TMS88D
TM88D
Number of measuring axes
1
2
Measuring ranges
360°
±90°
Resolution
0.01°
Static accuracy
±0.3° (typi‐
cal)
±0.5° (maxi‐
mum)
±0.3° (typi‐
cal)
±0.5° (maxi‐
mum)
Dynamic accuracy
±0.5° (typical)
Duration of spurious acceleration
suppression (configurable)
100 to 10000 ms
Temperature coefficient (zero point)
±0.01°/K (typical)
General parameters for the IMU
2
Acceleration sensor
Gyro sensor
Measuring ranges
±8 g
±250 °/s
Resolution
0.244 mg
0.00875 °/s
In run bias stability
–
6 °/h (typical)
Angular random walk (ARW)
–
0.2 °⁄√h
Temperature coefficient (zero point)
0.2 mg/K (typical)
0.005 °/s/K (typical)
General parameters
Sampling rate
200 Hz
Operating temperature
-40 °C to +80 °C
Properties
Data transmission rates
10k, 20k, 50k, 100k, 125k, 250k, 500k, 800k bit/s,
1 Mbit/s; Automatic detection
Functions
Polling of angle, cyclic and synchronized transmission,
parameterization, sensor fusion filter, digital low pass fil‐
ter (critically damped or Butterworth, 8th order), configu‐
ration via a digital interface
Electrical parameters
Supply voltage
8 to 36 V DC
Current consumption
15 mA @ 24 V
Maximum output current
350 mA
Mechanical parameters
Electrical connection
2 x sensor plug connectors, 5-pin M12 (male connector -
female connector, looped through)
4
TECHNICAL DATA
10
OPERATING INSTRUCTIONS
| TMS/TMM88, TMS/TMM61
8019054/14IT/2019-06-27
| SICK
Subject to change without notice